نوشتهها
 https://www.matlabi.ir/wp-content/uploads/2018/05/Pendulum.jpg
319
558
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
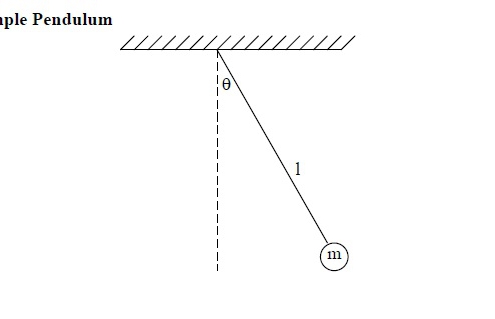
حسن یوسفی2018-05-18 01:31:092018-05-18 01:31:09خروجی سیستم دینامیکی آونگ با متلب
https://www.matlabi.ir/wp-content/uploads/2018/05/Pendulum.jpg
319
558
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2018-05-18 01:31:092018-05-18 01:31:09خروجی سیستم دینامیکی آونگ با متلب