توضیحات
پیشبینی و کنترل حرکت دوطرفه در تلهاپریشن تحت تأخیرهای زمانی طولانی و متغیر با زمان
عنوان اصلی مقاله:
Bilateral motion prediction and control for teleoperation under long time-varying delays
شبیه سازی در محیط سیمولینک متلب 2018 انجام شده است.
دارای گزارش ورد 7 صفحه ای می باشد.
ترجمه چکیده مقاله
در این مقاله، مسئله طراحی کنترلکننده دوطرفه برای سیستمهای تلهاپریشن با استفاده از یک روش پیشبینی حرکت مورد بررسی قرار گرفته است. بهمنظور جبران تأخیرهای زمانی طولانی و متغیر با زمان، پیشبینهای جدیدی ارائه شدهاند که میتوانند با تکیه بر اندازهگیریهای تأخیردار، موقعیتها و سرعتهای رباتها را در هر دو سمت بازسازی کنند. ساختار پیشنهادی شامل مجموعهای از زیر-پیشبینها است که بهصورت آبشاری در کنار هم قرار میگیرند و هر زیر-پیشبین حالتهای زیر-پیشبین قبلی را پیشبینی میکند. بدین ترتیب، تخمین حالت واقعی ربات از آخرین زیر-پیشبین بهدست میآید.
برای رسیدگی به تغییرات زمانمتغیر تأخیر، افق پیشبینی هر زیر-پیشبین بهصورت جدید و زمانمتغیر طراحی شده است. سپس براساس نتایج پیشبینی، کنترلکننده پیشبینیکننده دوطرفه برای سیستم تلهاپریشن طراحی میشود. با استفاده از روش لیاپانوف–کراسوفسکی، شرایط کافی برای ضرایب کنترلی ارائه میشود که تحت آنها خطای ردیابی موقعیت و خطای پیشبینی به نواحی کراندار همگرا میشوند. همچنین در حالت بدون عدمقطعیت، خطاهای پیشبینی بهصورت نمایی به صفر میل میکنند. کارایی روش پیشنهادی نیز از طریق شبیهسازیهای مقایسهای اثبات شده است.
توضیحات پروژه شبیهسازی کنترل دوطرفه تلهاپریشن با تأخیر متغیر
این پروژه شامل پیادهسازی کامل مقاله معتبر ISA Transactions، سال 2021 با موضوع پیشبینی حرکت و کنترل دوطرفه در سیستمهای تلهاپریشن تحت تأخیرهای طولانی و متغیر با زمان است.
در این مجموعه، مدلهای سیمولینک، کدنویسی کامل، اجرای شبیهسازی و تمامی نمودارهای اصلی مقاله بازتولید شده و نتایج بهطور قابلتوجهی مشابه مقاله هستند.
این محصول مناسب کنترل، رباتیک، مکاترونیک، اتوماسیون و سیستمهای هوشمند است.
محتویات محصول
۱. سه مدل سیمولینک کامل (نسخه MATLAB 2018b)
در پوشه Simulation سه مدل ارائه شده که تفاوت آنها در تعداد تخمینگرهای آبشاری (Cascade Predictors) است:
- sim_p1: دارای یک تخمینگر
- sim_p2: دارای دو تخمینگر
- sim_p3: دارای سه تخمینگر – مدل اصلی و کامل پروژه
در مدل سوم، مدلهای 1 و 2 بهصورت کامل قرار گرفتهاند. بنابراین کاربر تنها با مدل sim_p3 میتواند کل ساختار مقاله را مشاهده کند.
۲. توضیحات کامل ساختار مدل sim_p3
مدل سوم پیادهسازی کامل الگوریتم مقاله است و شامل بخشهای زیر میباشد:
بخش ۱ – معادلات تأخیرهای زمانی
- پیادهسازی تأخیرهای زمانمتغیر و مشتقات آنها
- اصلاح یک معادلهی مقاله که پیوستگی نداشت (برای تولید شکل مشابه شکل 4 مقاله)
بخش ۲ – تخمینگر شماره ۱
شامل دو زیرسیستم:
- ۲-۱: رویتگر Slave
- ۲-۲: رویتگر Master
معادلات هر دو قسمت یکسان هستند و بر اساس فرمولهای مقاله شمارهگذاری شدهاند:
- خطوط 4 تا 6: شماره و تنظیمات پیشبینها
- خطوط 8 و 9: پارامترهای مقاله (جدول 1)
- خط 11: معادله بالای رابطه 22
- خط 13: معادله 17
- خط 17: معادله 23
- خط 19: بخش انتگرالی معادله 23 (با اصلاح برای پایداری شبیهسازی)
- خط 21: معادله 20
- خط 23: معادله 21
بخش ۳ و ۴ – تخمینگرهای دوم و سوم
- مشابه تخمینگر 1
- ورودیها بهجای سیستم واقعی، از تخمینگر قبلی دریافت میشوند
- ساختار سهسطحی کاملاً مطابق مقاله
بخش ۵ – استخراج متغیرهای با تأخیر برای رسم نمودار
بخش ۶ – مسیرهای مرجع و نیروی ورودی انسان
- مدل دقیق نیروی انسانی
- اعمال یک اصلاح کوچک برای پیوستگی و عملکرد بهتر
- تغییر فاکتور 50 به 10 جهت بهبود پاسخ
بخش ۷ – اغتشاش واردشده به اپراتور
بخش ۸ – ورودی کنترلی Master
- پیادهسازی معادلات 69 و 71
- اصلاحات لازم برای پایداری (ایراد معادلات مقاله رفع شده)
بخش ۹ – مدل نیروی محیط
بخش ۱۰ – ورودی کنترلی Slave
در اینجا رابطه مربوطه معرفی نشده و با خرید این محصول قابل مشاهده است.
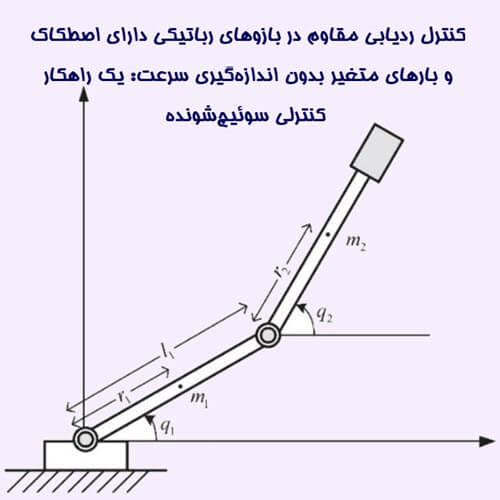
بخش 11 و 12 – دینامیک کامل دو ربات
با مدل یکسان برای Master و Slave
۳. فایل main.m
اجرای شبیهسازی تنها از طریق این فایل انجام میشود.
- خطوط 7–9: اجرای مدلهای سیمولینک
- خطوط 12 به بعد: رسم تمام نمودارهای مقاله
۴. نتایج شبیهسازی (کاملاً مشابه مقاله)
شکل 4 – شکل تأخیرها
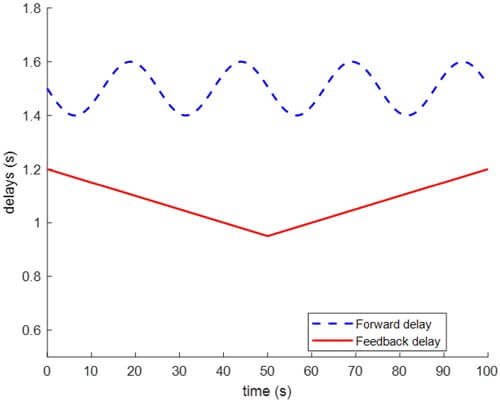
Fig. 4. Time delays
کامل مشابه مقاله اصلی
شکلهای 5 تا 7 – مقایسه حالتها
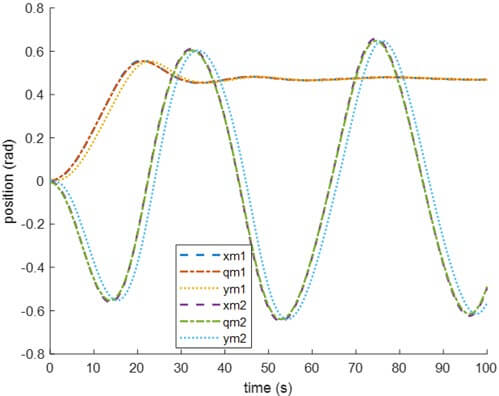
Fig. 5. Predicted results of joint positions of master robot
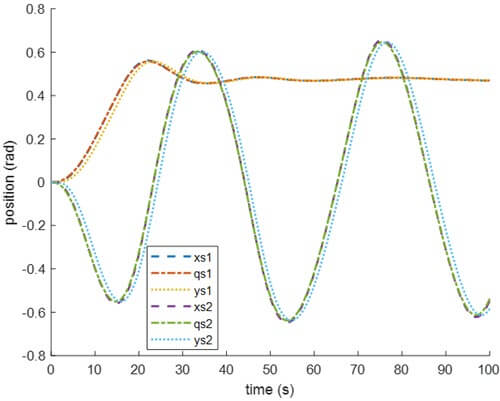
Fig. 6. Predicted results of joint positions of slave robot
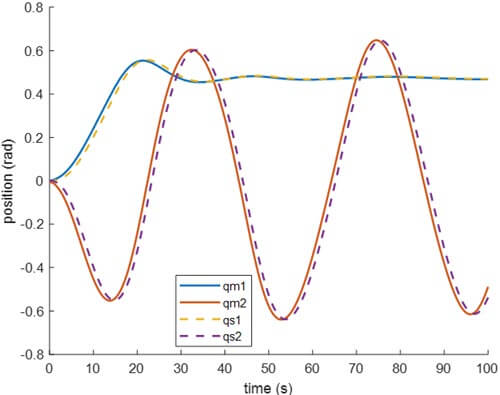
Fig. 7. Position tracking performance of teleoperation system
نمودارها با دقت بسیار بالا مشابه مقاله بازتولید شدهاند.
شکلهای 8 و 9 – خطای تخمینگرها

Fig. 8. Prediction errors for master robot with different numbers of predictors
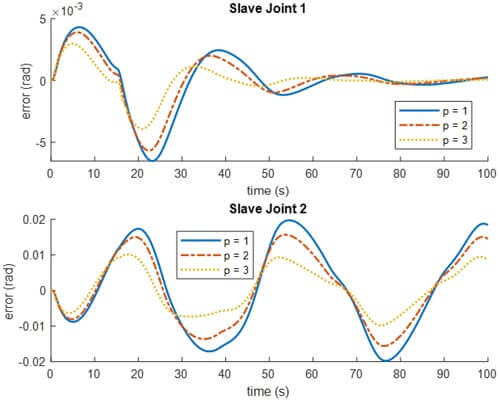
Fig. 9. Prediction errors for slave robot with different numbers of predictors
- تخمینگر 3 بهترین عملکرد
- تخمینگر 2 بهتر از 1
این نتایج دقیقاً مطابق تحلیل مقاله است.
ویژگیهای کلیدی پروژه
- پیادهسازی کامل و دقیق مقاله ISA
- اجرا در MATLAB 2018b (سازگار با نسخههای جدید نیز هست)
- سه مدل با تعداد پیشبینهای مختلف
- کنترل دوطرفه Master–Slave با تأخیرهای متغیر
- پیشبین آبشاری، پیشبینی موقعیت و سرعت در زمان واقعی
- کنترل مبتنی بر پیشبینی (Predictive Bilateral Control)
- رسم کامل نمودارهای مقاله
این محصول مناسب چه کسانی است؟
- دانش پژوهان برق – کنترل، مکاترونیک، رباتیک
- افرادی که روی تلهاپریشن، تأخیر زمانی، پیشبینی حالت، یا کنترل مقاوم کار میکنند
- اساتید یا پژوهشگرانی که نیاز به کد آماده برای توسعه مقالات جدید دارند
خروجیها
- فایلهای Simulink
- کدهای کامل main
- شکلها و نمودارهای تولیدشده
- گزارش کامل پروژه
- فایلهای قابل ویرایش برای توسعه پروژه
شاید به این موارد نیز علاقه مند باشید:
- جبران تأخیر زمانی در تلهاپریشن غیرخطی دوطرفه: یک رویکرد پیشبینی حرکت
- فیدبک خروجی با تأخیر زمانی عملیات دور دوطرفه با تخمین نیرو برای n درجه آزادی بازوهای غیرخطی
- کنترل پیشبینی مدل حداقل حداکثری خود راهانداز مقاوم برای سیستمهای غیرخطی زمان گسسته
- آموزش کنترل پیشبین مدل (MPC)
شبیهسازی پیشبینی و کنترل حرکت دوطرفه در تلهاپریشن تحت تأخیرهای زمانی طولانی و متغیر با زمان در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.