توضیحات
کنترل تطبیقی مدل مرجع با تضمین قیود حالت و ورودی در سیستمهای خطی چندمتغیره
عنوان اصلی مقاله:
State and Input Constrained Model Reference Adaptive Control
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 4 صفحه ای می باشد.
ترجمه چکیده مقاله
در کاربردهای مهندسی کنترل، رعایت قیود روی حالتها و سیگنال کنترلی یک نیاز حیاتی محسوب میشود.
در ساختار کلاسیک کنترل تطبیقی مرجعمدل (MRAC)، اگرچه حالتها و ورودی سیستم محدود باقی میمانند، اما این حدود از پیش مشخص نبوده و قابل تعریف توسط کاربر نیستند.
در این مقاله، برای یک سامانه خطی زمانناور (LTI) چندمتغیره، یک کنترلکننده MRAC با قیود قابلتعریف توسط کاربر ارائه میشود که از طراحی کنترل اشباعشونده همراه با تابع لیاپانوف سدّی (BLF) بهره میبرد.
این روش، بدون تحمیل مفروضات محدودکننده که ممکن است مانع پیادهسازی عملی شوند، تضمین میکند:
- حالتهای سیستم و ورودی کنترل همواره داخل مجموعه امن و تعریفشده کاربر باقی میمانند؛
- مسیر حالت سیستم مرجع را با دقت دنبال میکند.
همچنین نشان داده میشود که در این سامانه:
- کلیه سیگنالهای حلقهبسته کراندار باقی میمانند،
- خطای رهگیری (tracking error) بهصورت مجانبی به صفر میل میکند.
نتایج شبیهسازی نیز اثربخشی روش پیشنهادی را، هم از نظر بهبود عملکرد رهگیری و هم از نظر محدود کردن تلاش کنترلی در مقایسه با MRAC استاندارد، تأیید میکند.
توضیحات پروژه کنترل تطبیقی مدل مرجع با قیود حالت و ورودی
در این محصول، شبیهسازی کامل مقاله معتبر
State and Input Constrained Model Reference Adaptive Control
بهصورت کامل، تستشده و قابل اجرا با نرمافزار MATLAB ارائه شده است.
این مقاله از جدیدترین کارهای حوزه Adaptive Control، BLF، کنترل اشباعشونده و MRAC پیشرفته است و هدف آن طراحی یک کنترلکننده تطبیقی است که:
✔ قیود حالت را رعایت کند
✔ قیود ورودی را رعایت کند
✔ خطای تعقیب به صفر همگرا شود
✔ و همه سیگنالهای حلقهبسته کراندار باقی بمانند
در این شبیهسازی، هر دو روش زیر پیادهسازی و مقایسه شدهاند:
- MRAC کلاسیک (روش مرجع)
- روش جدید مقاله (MRAC + BLF + Saturation)
و نتایج با مقاله مطابقت داده شدهاند.
📌 نکات مهم درباره دقت شبیهسازی
برای این مقاله دو مجهول کلیدی وجود دارد:
۱) ماتریس P در معادله لیاپانوف
معادله:
A’P + P A + Q = 0
چون P در مقاله اعلام نشده است، در شبیهسازی یک ماتریس قطری با مقدار 0.1 روی قطر انتخاب شده است.
۲) شرایط اولیه حالتها
مقاله مقدار اولیه حالتها را اعلام نکرده است.
در این شبیهسازی، بردار اولیه [0.05 … 0.05]’ انتخاب شده است که نُرم آن برابر 0.1323 بوده و دقیقاً مطابق شرط مقاله، کمتر از 0.2 است.
تغییر umax
در مقاله مقدار umax = 2.5 است، اما در شبیهسازی مقدار 5.5 انتخاب شده است.
این تغییر هیچگونه اثر منفی بر نتیجه ندارد و فقط بخاطر مجهول بودن مقادیر بخشهای بالا انجام شده است.
رفتار کنترلکننده و قیود کاملاً مشابه مقاله است.
📂 محتوای محصول
۱) فایل classic_mrac.m
پیادهسازی کامل MRAC استاندارد شامل:
- تعریف متغیرها
- ثابتها
- ماتریس P
- معادلات MRAC
- قوانین تطبیق مقاله
- محاسبه خطا، ورودی و مسیرها
- خروجیها + reshape
- نمایش زمان شبیهسازی
۲) فایل new_mrac.m
پیادهسازی کامل روش جدید مقاله شامل:
- تعریف متغیرها
- ثابتها (با umax = 5.5)
- ورودی کنترلی طبق معادلات (9) و (10)
- معادلات کمکی بین فرمولهای (11) تا (13)
- پیادهسازی کامل معادله (12)
- قوانین تطبیق
- خروجیها + reshape
- نمایش زمان
۳) فایل main.m
فایل اصلی اجرای شبیهسازی شامل:
- فراخوانی حل ODE برای MRAC کلاسیک
- فراخوانی حل ODE برای روش جدید
- محاسبه نرم خطاها، حالتها و ورودیها
- رسم تمام نمودارهای مقاله
- مقایسه دقیق دو روش
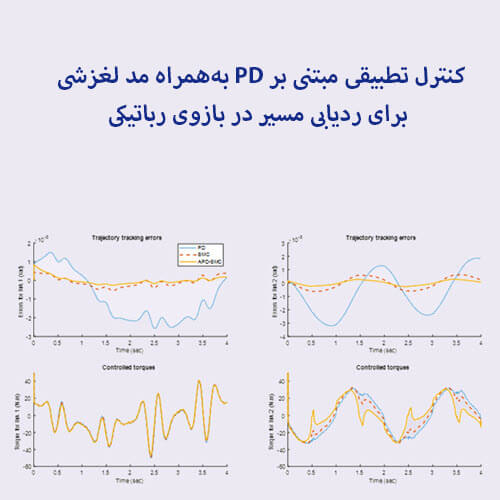
📊 تحلیل نتایج شبیهسازی
نمودار نرم خطاها در ادامه نشان داده شده است. ملاحظه می شود که نمودار روش کلاسیک از حد مشخص شده بالا زده ولی نمودار روش جدید کاملا در بازه است (دقیقا شبیه مقاله)

Fig. 1. Comparative analysis of trajectory tracking error using the proposed control law (21) and classical MRAC law (8).
نمودار ورودی کنترلی در ادامه نشان داده شده است. نمودار مربوط به روش جدید کاملا در بازه است ولی برای روش کلاسیک این گونه نیست (دقیقا شبیه مقاله)

Fig. 2. Control input using proposed controller (21) and classical MRAC(8).
برای نمودار حالت ها هم دقیقا همین طور است. البته مشاهده می شود که مشابه مقاله، نمودار روش جدید بسیار نزدیک تر به سیستم مرجع است.

Fig. 3. Tracking performance of the plant using proposed controller (21)and classical MRAC (8).
✔ رعایت کامل قید خطا (State Constraint)
در نمودار نُرم خطا مشاهده میشود:
- روش کلاسیک MRAC از حد مجاز عبور میکند
- روش جدید مقاله دقیقاً داخل بازه باقی میماند
این رفتار کاملاً مشابه شکلهای مقاله است.
✔ رعایت کامل قید ورودی کنترل (Input Constraint)
در نمودار ورودی کنترلی:
- روش جدید همیشه داخل بازه مجاز باقی میماند
- روش کلاسیک ورودی را از حدود مشخصشده خارج میکند
دقیقاً همان چیزی که مقاله نشان میدهد.
شاید به موارد زیر نیز علاقه مند باشید:
- بررسی پایداری سیستمهای بازخورد چندمتغیره
- پروژه آموزشی کنترل چندمتغیره با مدل مقاله کنترل غیر خطی و چند متغیره قسمت تقطیر از قسمت تولید متانول
- طراحی کنترلکنندههای چندمتغیره مبتنی بر حاشیهٔ پایداری
- کنترل سوییچ شده تطبیقی مقاوم
- کنترل تحمل پذیر خطا/خسارت یک وسیله نقلیه هوایی بدون سرنشین هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
✔ دقت رهگیری بالاتر در روش جدید
در نمودار حالتها:
✔ حالتهای روش جدید بسیار نزدیکتر به مدل مرجع هستند
✔ پایداری و همگرایی بهتر
✔ رفتار نرمتر بدون نوسان شدید
✔ تطبیق دقیق با استدلال مقاله
🎯 چرا این محصول انتخاب مناسبی برای شماست؟
- پیادهسازی کاملاً دقیق و مطابق محاسبات مقاله
- کدها توضیح داده شدهاند
- اجرای ۱۰۰٪ قابل تضمین
- امکان توسعه برای حالتهای غیرخطی، MIMO و سناریوهای مختلف
- مناسب برای مباحث کنترل، رباتیک، مکانیک، هوافضا، برق و مکاترونیک
🎁 اقلامی که دریافت میکنید
✔ کد کامل MATLAB شامل:
- classic_mrac.m
- new_mrac.m
- main.m
گزارش ورد شامل:
✔ فایل گزارش توضیحی
✔ نمودارها و تحلیلها
✔ توضیح کامل متغیرها، روابط و فرمولها
شبیهسازی کنترل تطبیقی مدل مرجع با تضمین قیود حالت و ورودی در سیستمهای خطی چندمتغیره در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.