توضیحات
کنترل تطبیقی مبتنی بر PD بههمراه مد لغزشی برای ردیابی مسیر در بازوی رباتیکی
عنوان اصلی مقاله:
Adaptive PD plus Sliding Mode Control for Robotic Manipulator
شبیه سازی در محیط ام فایل و سیمولینک متلب 2018 انجام شده است.(با متلب 2024 و 2025b) نیز تست و اجرا شده)
دارای گزارش ورد 7 صفحه ای می باشد.
ترجمه چکیده مقاله
در این مقاله یک قانون کنترل تطبیقی ترکیبی، موسوم به APD-SMC، مبتنی بر کنترل تناسبی–مشتقی (PD) بههمراه کنترل مد لغزشی (SMC) برای مسئله ردیابی مسیر در بازوی رباتیکی ارائه میشود. بخش PD برای همگرایی اولیه و نرمالسازی خطای ردیابی بهکار گرفته شده، بخش SMC موجب نزدیکشدن سیستم به سطح لغزشی میگردد، و بخش تطبیقی وظیفه تخمین برخط دینامیک نامعلوم سیستم را برعهده دارد. سیستم کنترل پیشنهادی ویژگیهای کنترلی PD و SMC را همزمان با قابلیت سازگاری با عدمقطعیتهای دینامیکی ربات ترکیب میکند. تحلیل پایداری کنترلگر بر پایه نظریه لیاپانوف انجام شده است. همچنین نتایج شبیهسازی، همراه با مقایسه با روشهای دیگر، اثربخشی قانون کنترل APD-SMC را در بهبود عملکرد ردیابی مسیر تأیید میکند.
توضیحات پروژه شبیهسازی مقاله کنترل APD-SMC ربات دو درجه آزادی
اگر به دنبال یک شبیهسازی کاملاً حرفهای، دقیق و آمادهتحویل از یکی از مقالات معتبر IEEE در زمینه کنترل ربات، کنترل تطبیقی و کنترل مد لغزشی هستید، این محصول دقیقاً همان چیزی است که نیاز دارید.
در این پروژه، مقاله زیر بهطور کامل مدلسازی، شبیهسازی و بازتولید شده است:
Adaptive PD Plus Sliding Mode Control for Robotic Manipulator (AIM 2016)
در این کار، کنترلرهای PD، SMC، PD-SMC و کنترلر پیشنهادی APD-SMC روی ربات دو درجه آزادی تست شدهاند و تمامی نمودارهای مقاله بازتولید شدهاند.
ویژگیهای اصلی محصول
1. شبیهسازی کامل در محیط Simulink (نسخه 2018)
تمام مدلها در محیط سیمولینک نسخه 2018 طراحی شدهاند و ورژن های 2024 و 2025 نیز تست و اجرا شده است.
2. پیادهسازی کامل تمام کنترلگرهای مقاله
در این پروژه کنترلگرهای زیر بهطور کامل طراحی شدهاند:
- کنترلر APD-SMC (براساس معادلات 3، 5، 6 و 18 مقاله)
- کنترلر PD (بخش خطی معادله 5 مقاله)
- کنترلر SMC (طراحی و تنظیم براساس ساختارهای مرسوم SMC، چون مقاله توضیح نداده است)
- کنترلر PD-SMC (مطابق مرجع 21 مقاله)
3. پیادهسازی کامل دینامیک 2-DOF ربات
معادله دینامیکی ربات (معادله 1) بهطور کامل پیادهسازی شده است، شامل:
- ماتریس جرم: M(q)
- ماتریس کوریولیس و گریز از مرکز: C(q, q̇)
- بردار گرانش: G(q)
- اصطکاک و اغتشاشات مطابق مقاله
4. ۵ سناریوی شبیهسازی دقیقاً مطابق مقاله
در پوشه Simulation پنج پوشه مربوط به پنج تست مختلف مقاله وجود دارد:
- حالت نرمال (مسیرهای اصلی مقاله)
- اعمال خطای اولیه 0.01 رادیان برای هر لینک
- افزودن بار 2.5kg به انتهای لینک 2 در زمان 2.5 ثانیه
- جایگزینی کنترلر PD با PD-SMC + تغییر بار
- مسیرهای مرجع با سرعت دو برابر (بخش E مقاله)
5. حل دقیق با ODE23s (مطابق مقاله)
تمام مدلها با solver پیشنهادی مقاله (ode23s) اجرا شدهاند.
6. شباهت نتایج با مقاله
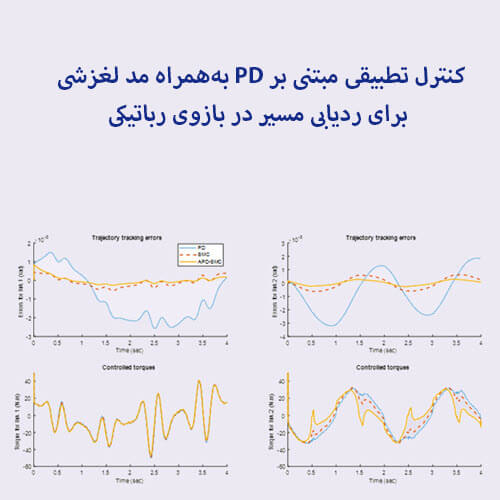
تمام نمودارهای:
- خطاهای ردیابی
- گشتاورهای کنترلی
- مقایسه کنترلگرها
تحلیل نتایج:
با دقت در نمودارها ملاحظه می گردد نتایج بسیار به مقاله نزدیک هستند و حتی ترتیب بهتر یا بدتر بودن کنترلرها هم شبیه مقاله شده است. تمام مدل ها با روش ode23s حل شده اند. البته ممکن است در برخی نمودارها تطابق 100 در 100 وجود نداشته باشد که این موضوع طبیعی است زیرا مثلا در مورد کنترلر SMC هیچ توضیحی در مقاله وجود ندارد یا این که اطلاعی از ورودی های PD-SMC نداریم. ولی برای دو روش PD و APD-SMC که دقیقا مطابق مقاله طراحی شده اند این اطمینان وجود دارد که درصد تطابق بسیار بالا می باشد.

Fig. 1. Tracking errors and torques for normal operation

Fig. 2. Tracking errors with initial errors.

Fig. 3. Tracking errors and torques with payload

Fig. 4. Tracking errors for three different SMC laws.

Fig. 5. Tracking errors and torques for double speed operation.
محتویات محصول
این محصول شامل موارد زیر است:
- پوشه Simulation شامل ۵ پوشه شبیهسازی
- ۵ مدل سیمولینک (SLX)
- ۵ فایل main.m برای اجرای هر مدل و رسم نمودارها
- کد کامل دینامیک ربات + کنترلرها
- فایلهای لازم برای بازتولید کامل نتایج مقاله
- دیاگرامهای سیمولینک کاملاً مرتب و استاندارد
- گزارش کامل تحلیل و نتایج
این محصول آماده ارائه بهعنوان:
- مرتبط با کنترل پیشرفته
- پروژه کنترل ربات با SMC
- کنترلهای تطبیقی
است.
چرا این محصول ارزش خرید دارد؟
- مقاله کاملاً پیادهسازی شده
- فایلها بدون نیاز به هیچ تنظیمات اضافی اجرا میشوند
- نتایج بسیار نزدیک به نتیجه اصلی مقاله
- پوشهبندی و ساختار پروژه حرفهای و قابل ارائه
- قیمت بسیار کمتر از هزینه طراحی و شبیهسازی از صفر
پیشنیازها
- MATLAB 2018a یا بالاتر
- Simulink
- آشنایی مقدماتی با کنترل ربات (اختیاری)
شبیهسازی کنترل تطبیقی مبتنی بر PD-بههمراه مد لغزشی برای ردیابی مسیر در بازوی رباتیکی در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.