
توضیحات
کنترل تطبیقی مقاوم رباتهای کابلی موازی کاملاً مقید
عنوان اصلی مقاله:
Adaptive robust control of fully-constrained cable driven parallel robots
شبیه سازی در محیط سیمولینک و ام فایل متلب 2018b انجام شده است.(با متلب 2024b نیز تست و اجرا شده)
دارای گزارش ورد 5 صفحه ای می باشد.
ترجمه چکیده مقاله:
در این مقاله، کنترل تطبیقی مقاوم (ARC) رباتهای کابلی موازی کاملاً مقید بهصورت جامع مورد بررسی قرار میگیرد. از آنجا که مدلهای سینماتیکی و دینامیکی این رباتها در عمل بهطور کامل شناختهشده نیستند و شامل عدمقطعیتهای ساختاری و پارامتری میباشند، یک کنترلکننده تطبیقی مقاوم مبتنی بر مد لغزشی پیشنهاد شده است که بر اساس تطبیق کران بالای عدمقطعیتها طراحی میشود.
روش ارائهشده نیازی به آگاهی پیشین از کران عدمقطعیتها و همچنین فرم رگرسیونی خطی مدلهای سینماتیکی و دینامیکی ندارد. علاوه بر این، بهمنظور تضمین مثبت ماندن کشش تمامی کابلها، مفهوم نیروی داخلی در ساختار کنترلکننده بهکار گرفته شده است. کنترلکننده پیشنهادی ضمن حفظ کشش مثبت کابلها در کل فضای کاری ربات، فاقد پدیده نوسان (chattering)، از نظر محاسباتی ساده بوده و نیازی به اندازهگیری شتاب اندافکتور ندارد.
پایداری سیستم حلقهبسته با استفاده از روش دوم لیاپانوف تحلیل شده و نشان داده میشود که خطای رهگیری بهصورت یکنواخت کراندار نهایی باقی میماند. در نهایت، کارایی کنترلکننده پیشنهادی از طریق انجام آزمایشهای عملی روی یک ربات کابلی موازی صفحهای مورد ارزیابی قرار گرفته و نتایج تجربی عملکرد مناسب آن را در رهگیری مسیر تأیید میکنند.
توضیحات پروژه کنترل تطبیقی مقاوم ربات کابلی در MATLAB/Simulink
در این پروژه، شبیهسازی و تحلیل کنترل حرکت یک سیستم رباتیکی بر اساس مقاله معتبر ISI با عنوان:
Adaptive Robust Control of Fully-Constrained Cable Driven Parallel Robots
انجام شده است. تمرکز اصلی این شبیهسازی، پیادهسازی و مقایسه عملکرد روش کنترلی پیشنهادی مقاله (کنترل تطبیقی مقاوم) با دو کنترلر مرجع Sliding Mode Control (SMC) و PID در محیط MATLAB/Simulink میباشد.
هدف پروژه
هدف این پروژه، بررسی عملکرد کنترلی، دقت رهگیری و پایداری سیستم تحت سه ساختار کنترلی مختلف است، بهگونهای که:
- رفتار سیستم تحت عدم قطعیتها و اغتشاشات بررسی شود
- برتری روش پیشنهادی مقاله نسبت به روشهای کلاسیک نشان داده شود
- چارچوب کنترلی مقاله بهصورت عملی و قابل اجرا در متلب پیادهسازی گردد
روش انجام شبیهسازی
با توجه به ابهامات و نواقص موجود در مقاله (که در گزارش نیز بهطور شفاف ذکر شده است)، شبیهسازی با رویکرد زیر انجام شده است:
- از مدل دینامیکی اصلی سیستم مطابق معادلات مقاله استفاده شده است
- به دلیل عدم ارائه ماتریسهای تخمینی و ضرایب کنترلی در مقاله:
- مقادیر پارامترهای کنترلی بهصورت منطقی و مهندسی انتخاب شدهاند
- ماتریسهای دینامیکی تخمینی با ماتریسهای واقعی سیستم جایگزین شدهاند
- کنترلر مود لغزشی (SMC) بر اساس تئوری کلاسیک و روابط زیر طراحی شده است:
- تعریف خطای تعقیب و سطح لغزش
- استخراج قانون کنترلی مبتنی بر تابع
sign(S)
- کنترلر PID با استفاده از ابزار PID Tuning در Simulink تنظیم شده است
- کلیه محاسبات کنترلی در بلوکهای MATLAB Function انجام شدهاند (کدنویسی واقعی متلب)
- شبیهسازی در محیط Simulink 2018b اجرا شده است تا امکان استفاده از مشتقگیرها و انتگرالگیرها فراهم شود
ساختار مدل Simulink
مدل شبیهسازی شامل بخشهای زیر است:
- تولید مسیر مرجع با MATLAB Function
- مدل دینامیکی سیستم مطابق معادله دینامیکی مقاله
- کنترلر پیشنهادی مقاله (Adaptive Robust Controller)
- کنترلر مود لغزشی (SMC)
- کنترلر PID
- اعمال اغتشاش خارجی به سیستم
- مقایسه خروجیها و خطای رهگیری
تمام معادلات مقاله (از جمله معادلات سطح لغزش، قانون کنترل و قوانین تطبیقی) بهصورت مستقیم و دقیق در مدل پیادهسازی شدهاند.
تحلیل و نتایج شبیهسازی
نتایج بهدستآمده از این پروژه، مستقیماً متناظر با شکل ۴ مقاله مرجع میباشند.
شکل ۴ مقاله شامل سه نمودار مجزا است که عملکرد سه کنترلر مختلف را در رهگیری مسیر مرجع نشان میدهد:
-
کنترلر PID
-
کنترلر مود لغزشی (SMC)
-
کنترلر تطبیقی مقاوم پیشنهادی مقاله (ARC)
در این شبیهسازی، هر سه کنترلر بهصورت مستقل و تحت شرایط یکسان (مدل دینامیکی، مسیر مرجع و اغتشاش) پیادهسازی شدهاند و نتایج حاصل، بازتولید عددی نتایج شکل ۴ مقاله در محیط MATLAB/Simulink میباشند.
📊 تحلیل نتایج (مطابق شکل ۴ مقاله)
-
کنترلر PID
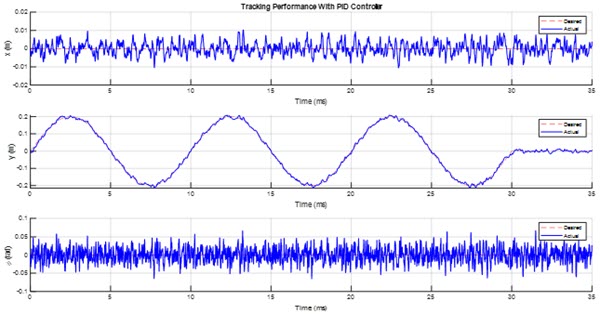
Fig. 4. Tracking performance with PID Controller
دارای خطای تعقیب بالا بوده و در مواجهه با اغتشاش و تغییرات دینامیکی عملکرد ضعیفی از خود نشان میدهد.
-
کنترلر مود لغزشی (SMC)
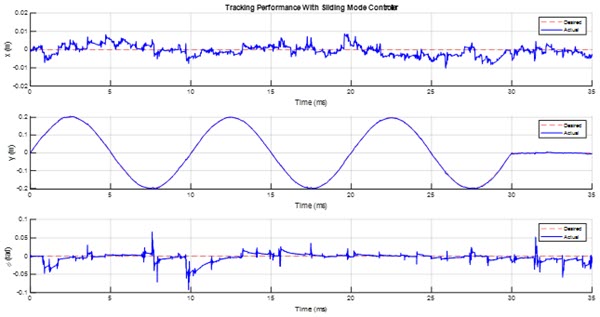
Fig. 4. Tracking performance with Sliding Mode Controller
نسبت به PID بهبود قابل توجهی در کاهش خطا دارد، اما به دلیل نبود مکانیزم تطبیق، دقت و سرعت همگرایی آن محدود است.
-
کنترلر تطبیقی مقاوم پیشنهادی مقاله (ARC)
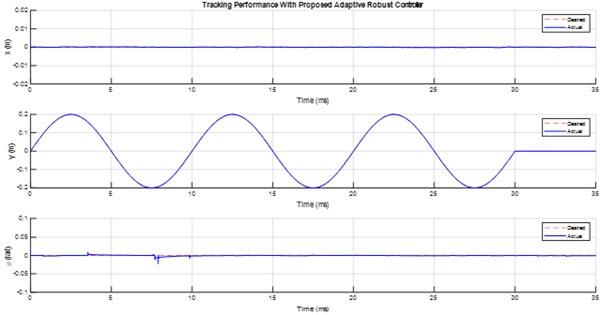
Fig. 4. Tracking performance with Proposed Controller
بهترین عملکرد را از نظر:
-
-
کمینهسازی خطای تعقیب
-
پایداری پاسخ
-
مقاومت در برابر اغتشاش
ارائه میدهد که این موضوع کاملاً منطبق با نتایج گزارششده در شکل ۴ مقاله است.
-
این نتایج کاملاً با نتیجهگیری مقاله مرجع همخوانی دارد و اعتبار روش پیشنهادی را در محیط شبیهسازی تأیید میکند.
-
نتایج ارائهشده، مربوط به بازتولید نتایج شکل ۴ مقاله هستند
-
بخشهای آزمایشگاهی و سختافزاری مقاله در این پروژه لحاظ نشدهاند.
مناسب چه کسانی است؟
این پروژه مناسب است برای:
- مهندسین کنترل، رباتیک و مکاترونیک
- افرادی که قصد:
- شبیهسازی مقاله ISI
- یادگیری عملی SMC و کنترل تطبیقی
- مقایسه PID، SMC و ARC در متلب
را دارند.
شاید به موارد زیر نیز علاقه مند باشید:
- شبیهسازی جبرانسازی کوره قوس الکتریکی در سیمولینک متلب
- شارژ گسترده خودروهای برقی با مشارکت انرژیهای تجدیدپذیر
- افزایش دقت ردیابی مسیر برای ربات صنعتی با کنترل تطبیقی مقاوم
- کنترل مود لغزشی مرتبه کسری برای کنترل وضعیت ماهوارهای اسمی و کم کار
- کنترل مود لغزشی مقاوم در برابر خطا برای پهپاد کوادروتور با فیدبک تاخیری
شبیهسازی کنترل تطبیقی مقاوم رباتهای کابلی موازی کاملاً مقید در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.