
توضیحات
کنترل توزیعشده مقاوم پرواز آرایشی فضاپیماها با توپولوژی شبکه تطبیقی
عنوان اصلی مقاله:
Robust distributed control of spacecraft formation flying with adaptive network topology
شبیه سازی در محیط امفایل متلب انجام شده است.
دارای گزارش ویدیویی 34 دقیقه ای می باشد.
ترجمه چکیده مقاله
در این پژوهش، کنترل هماهنگ توزیعشده شش درجه آزادی (6-DOF) برای پرواز آرایشی فضاپیماها در مدار پایین زمین (LEO) مورد بررسی قرار گرفته است. بدین منظور، یک مدل دقیق و کوپلشده دینامیک نسبی انتقالی و دورانی فضاپیماها نسبت به مدار مرجع (رهبر مجازی) ارائه شده است که در آن، مهمترین شتابهای اغتشاشی مؤثر بر ماهوارههای مدار LEO، شامل هارمونیک دوم گرانشی (J2) و نیروی درگ اتمسفری لحاظ شدهاند.
در ادامه، مسئله کنترل هماهنگ شش درجه آزادی فضاپیماهای پرواز آرایشی بررسی میشود. در طول مأموریت، فضاپیماها از طریق یک توپولوژی شبکه سوئیچشونده با یکدیگر تبادل اطلاعات دارند که در آن، وزنهای ماتریس لاپلاسی گراف شبکه بهصورت تطبیقی و بر اساس یک تابع اتصال وابسته به فاصله میان عاملهای مجاور تغییر میکند.
از آنجا که برخی پارامترهای دینامیکی سیستم، نظیر جرم فضاپیماها و ممانهای اینرسی، ممکن است در طول زمان تغییر کنند، یک قانون کنترل تطبیقی برای تخمین برخط این پارامترها در حین مأموریت توسعه داده شده است. علاوه بر این، برای حالتی که هیچگونه اطلاعی از پارامترهای نامعلوم و متغیر با زمان سیستم در دسترس نباشد، یک کنترلکننده مقاوم طراحی شده است.
پایداری سیستم حلقهبسته، همراه با تطبیق توپولوژی شبکه و خواص بهینگی و مقاومت کنترلی، با استفاده از تحلیل انقباضی مقاوم بهعنوان یک روش پایداری افزایشی برای سیستمهای چندعامله همزمانشده، بهصورت تحلیلی اثبات شده است. نتایج شبیهسازی، کارایی بالای هر یک از روشهای کنترلی را در حضور عدم قطعیتها و تغییرات پارامتری نشان میدهد. همچنین، کنترلکنندههای تطبیقی و مقاوم نسبت به روشهای دیگر، کاهش قابلتوجهی در انتگرال خطای حالت، میزان تلاش کنترلی و زمان نشست سیستم ایجاد میکنند.
📌 توضیحات پروژه شبیهسازی کنترل توزیعشده پرواز آرایشی فضاپیماها در MATLAB
در این پروژه، شبیهسازی کامل مقاله معتبر منتشرشده در ژورنال Acta Astronautica با عنوان
Robust Distributed Control of Spacecraft Formation Flying with Adaptive Network Topology
در محیط MATLAB پیادهسازی و نتایج آن بهصورت دقیق بازتولید شده است.
تمرکز اصلی پروژه بر کنترل توزیعشده، مقاوم و تطبیقی پرواز آرایشی فضاپیماها با در نظر گرفتن توپولوژی شبکه تطبیقی، عدم قطعیتهای پارامتری و اغتشاشات محیطی در مدار پایین زمین (LEO) میباشد.
📊 خروجیهای شبیهسازی
تمامی شکلهای خروجی مقاله از شکل 3 تا شکل 13 بهصورت کامل در این پروژه بازتولید شدهاند، از جمله:
- همگرایی موقعیت نسبی فضاپیماها در آرایش پروازی
- هماهنگی و همزمانی وضعیت دورانی (Attitude Synchronization)
- تغییرات توپولوژی شبکه ارتباطی مبتنی بر فاصله
- پاسخ سیستم در حضور عدم قطعیتهای پارامتری
- مقایسه عملکرد کنترلکنندههای بهینه، تطبیقی و مقاوم
- کاهش خطای حالت، تلاش کنترلی و زمان نشست سیستم

Fig. 3. Role of β (part a) and rc (part b) in distance-based connectivity function

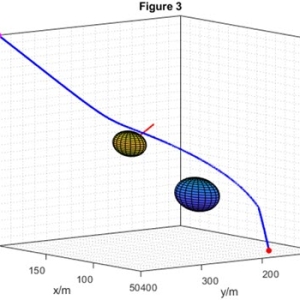
Fig. 4. Initial and desired positions and the transfer trajectories of the spacecraft using optimal control method

Fig. 5. Desired (solid line) and controlled attitude angles of the spacecraft using optimal control method

Fig. 6. The control force effort of the spacecraft using optimal control method

Fig. 7. The control torque effort of the spacecraft using optimal control method

Fig. 8. Variation of the connectivity and diffusive coupling gains weighted by the
connectivity for the 4th spacecraft (i = 4)

Fig. 9. Initial and desired positions and the transfer trajectories of the spacecraft using adaptive control method

Fig. 10. Desired (solid line) and controlled attitude angles of the spacecraft using adaptive control method

Fig. 11. The control torque effort of the spacecraft using adaptive control method

Fig. 12. Desired (solid line) and controlled attitude angles of the spacecraft using robust control method

Fig. 13. The control torque effort of the spacecraft using robust control method
نتایج شبیهسازی با نتایج مقاله تطابق مناسب داشته و رفتار سیستم از نظر پایداری و عملکرد کنترلی بهخوبی تأیید شده است.
🧠 توضیح مهم درباره معادلات مقاله (شفافسازی فنی)
🔸 معادلات شماره (4) مقاله که مربوط به مدل دینامیکی مدار مرجع (ماهواره رهبر) هستند، طبق بررسی انجامشده:
- نقش مستقیمی در فرآیند شبیهسازی کنترل توزیعشده نداشتهاند
- صرفاً بهعنوان مدل مرجع ماهواره از مراجع استاندارد دینامیک مداری استخراج شدهاند
- شامل پارامترهای متعدد و بعضاً نامعلوم هستند
- خود مقاله نیز توضیح و توسعهی کاملی درباره این معادلات ارائه نکرده است
به همین دلیل، مطابق رویه رایج در پیادهسازیهای عددی و با نظر برنامهنویس، تمرکز شبیهسازی بر معادلات کنترلی اصلی مقاله قرار گرفته و سایر بخشها دقیقاً مطابق مقاله پیادهسازی شدهاند.
⚙️ فرضیات و پارامترگذاری
در بخشهایی از مقاله که مقادیر عددی پارامترها بهصورت صریح ارائه نشدهاند:
- پارامترها بهصورت فرضی اما معقول انتخاب شدهاند
- فرضیات بهگونهای در نظر گرفته شدهاند که پایداری، همگرایی و صحت رفتار سیستم حفظ شود
- این موضوع کاملاً منطبق با روال استاندارد شبیهسازی مقالات علمی است
🎥 گزارش پروژه
بههمراه این پروژه، یک گزارش ویدیویی کامل به مدت ۳۴ دقیقه ارائه میشود که شامل:
- توضیح ساختار کلی مقاله
- تشریح مدلسازی و منطق شبیهسازی
- بررسی نتایج خروجی و تطابق با مقاله
این ویدیو برای درک عمیقتر شبیه سازی و مقاله کاملاً مناسب است.
📁 موارد تحویلی پروژه
✔ کدهای کامل MATLAB
✔ خروجی شکلهای 3 تا 13 مقاله
✔ گزارش ویدیویی 34 دقیقهای
✔ ساختار کدنویسی قابل توسعه و ویرایش
🎯 مناسب چه کسانی است؟
- مهندسین برق، هوافضا و کنترل
- پروژههای درس کنترل پیشرفته، سیستمهای چندعامله، کنترل مقاوم
- افرادی که قصد درک عملی مقاله و استفاده از آن در پژوهش خود را دارند
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مشارکتی بهینه داده محور برای تیم کوادروتور با داینامیک ناشناخته
- کنترل پیشبین مدل خروجی–بازخورد توزیعشده مقاوم مبتنی بر رویداد برای سامانههای چندعاملی غیرخطی در برابر حملات تزریق داده جعلی
- یک توپولوژی مبتنی بر کنترل مود لغزشی مرتبه کسری برای بهبود پایداری گذرا سیستمهای انرژی باد
- طراحی اتوپایلوت با استفاده از جدول بندی بهره و فیدبک حالت برای موشکی با عملگرهای آیرودینامیکی
- کنترل مد لغزشی با زمان تثبیتشده مبتنی بر ناظر اغتشاش برای عملیات نزدیکی فضاپیما با دینامیک کوپلشده
میخواهید پروژه هوافضای خود را به مجریان متخصص بسپارید؟ صفحه انجام پروژه هوافضا بهترین راهنمای شماست.
شبیهسازی کنترل توزیعشده مقاوم پرواز آرایشی فضاپیماها با توپولوژی شبکه تطبیقی در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.