توضیحات
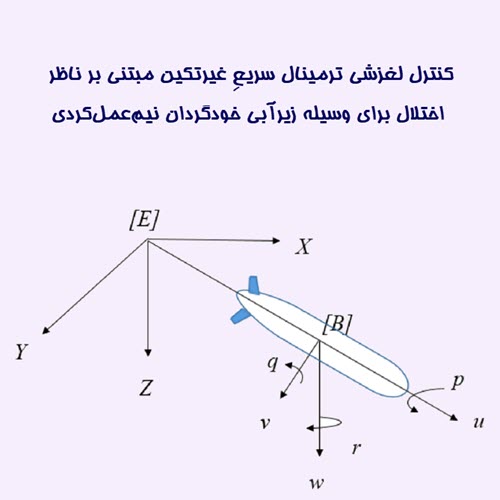
کنترل لغزشی ترمینال سریعِ غیرتکین مبتنی بر ناظر اختلال برای وسیلهٔ زیرآبی خودگردان نیمعملکردی
عنوان اصلی مقاله:
Disturbance observer based nonsingular fast terminal sliding mode control of underactuated AUV
شبیه سازی در محیط ام فایل متلب کدنویسی شده است.
دارای گزارش ویدیویی 13 دقیقه ای می باشد.
ترجمه چکیده مقاله
در این مقاله یک روش کنترلی مبتنی بر ناظر اختلال و کنترل لغزشی ترمینال سریعِ غیرتکین (NFTSMC) برای مسئلهٔ دنبالسازی مسیر وسیلهٔ زیرآبی خودگردان نیمعملکردی پیشنهاد شده است. ابتدا یک ناظر غیرخطی برای تخمین اغتشاشات پیچیدهٔ خارجی طراحی شده و سپس در قانون کنترل NFTSMC وارد میشود تا اثر اغتشاشات جبران گردد. در طراحی سطوح لغزش، دامنهٔ انتخاب پارامترهای نمایی در عبارات NFTSMC گسترش داده شده است تا انعطافپذیری بیشتری در تنظیم سرعت همگرایی فراهم آید. با استفاده از روش لاپانوف (نظریهٔ دوم لیاپانوف) پایداری یکنواخت نهایتاً محصور (uniformly ultimately bounded) برای ترکیب ناظر–کنترل پیشنهادی اثبات میشود. شبیهسازیها کارآیی کنترلکنندهٔ پیشنهادی را نشان میدهند: نسبت به روشهای موجود NTSMC، سرعت همگرایی بهبود یافته و کنترلکننده در برابر اغتشاشات پیوستهٔ صاف مقاوم است. همچنین در مواجهه با اغتشاشات تصادفی همراه با تکانههای زمانیِ گسسته، ناظر پیشنهادی میتواند اغتشاش را بهخوبی تخمین بزند و پایداری و دقت پیگیری را حفظ کند.
توضیحات پروژه کنترل NFTSMC برای AUV نیمعملگر
Disturbance Observer Based Nonsingular Fast Terminal Sliding Mode Control of Underactuated AUV
بهصورت کدنویسی MATLAB (کامل، تمیز، قابل اجرا)
این محصول شامل پیادهسازی کامل روش کنترلی مطرحشده در مقاله «کنترل لغزشی ترمینال سریع غیرتکین مبتنی بر ناظر اختلال برای وسیلهٔ زیرآبی خودگردان نیمعملگر (Underactuated AUV)» است. در این پروژه، مدل دینامیکی وسیلهٔ زیرآبی، ناظر اختلال غیرخطی، کنترلکننده NFTSMC، تولید مسیر مرجع، تولید دو نوع اغتشاش پیچیده، و استخراج تمامی نمودارهای کلیدی مقاله با دقت بالا پیادهسازی شدهاست.
محتوای فایلها
این محصول شامل موارد زیر است:
- کدنویسی کامل کنترلکننده NFTSMC مطابق معادلات مقاله
- پیادهسازی ناظر اختلال (Disturbance Observer) برای تخمین بههنگام اغتشاشات محیطی
- مدل دینامیکی کامل AUV نیمعملگر (3DOF) با پارامترهای واقعی جدول 1
- تولید دو سناریوی اغتشاش دقیقاً مشابه مقاله
- نوع اول: اغتشاشهای هموار پیوسته
- نوع دوم: اغتشاشهای تصادفی همراه با ضربههای شدید
- مقایسهٔ عملکرد کنترلکننده با و بدون ناظر اختلال
- محاسبهٔ شاخصهای استاندارد IAE، ISE، ITAE برای تحلیل عملکرد مسیر
- نمودارهای کامل مقاله
- مسیر طیشده AUV
- خطای موقعیت ex و ey
- خطای سرعت eu و ev
- سرعتهای u، v، r
- تخمین اغتشاش (d و d̂)
- ورودیهای کنترلی τu و τr
- کدنویسی کاملاً ساختیافته، قابلفهم و مناسب توسعه
ویژگیهای کلیدی این محصول
- تمامی روابط از معادلات 1، 6، 20–37، ناظر اختلال (12–15)، و بخش شبیهسازی مقاله استخراج شدهاند.
- کاملاً تستشده و بدون خطا
کدها با ODE45 اجرا شده و پایداری و صحت خروجیها بررسی شدهاند. - تحلیل دقیق عملکرد کنترلکننده
نتایج نشان میدهد که:- کنترلکننده NFTSMC با ناظر اختلال دارای سرعت همگرایی بالاتر و خطای کمتر است.
- در سناریوی اغتشاش شدید، ناظر توانایی مناسبی در تخمین d(t) دارد.
- ورودیهای کنترلی نسبت به نسخه بدون DO رفتار نرم و پایدار دارند.
مخاطبان این محصول
این شبیهسازی برای دستههای زیر کاملاً مناسب است:
- مهندسین کنترل، رباتیک و شناورهای زیرسطحی
- پژوهشگران حوزه سیستمهای Underactuated
- مهندسان سازههای دریایی، AUV، ROV
- افراد نیازمند پیادهسازی روشهای Sliding Mode پیشرفته
نیازمندیهای اجرا
- MATLAB R2018b یا بالاتر
- بدون نیاز به هیچ تولباکس خاص
- کافی است اسکریپت
main.mاجرا شود
خروجیهای پروژه
پس از اجرای اسکریپت، تمام نمودارهای مقاله تولید میشود، از جمله:
- مسیر AUV روی صفحه XY
- خطاهای ex، ey
- سرعتهای u، v، r
- خطاهای eu و ev
- تخمین اغتشاشها d̂
- ورودیهای کنترلی τu و τr
- نمودار میلهای شاخص خطا (IAE، ISE، ITAE)
در اینجا نتایج بدست آمده از شبیه سازی با متلب را قرار داده ایم:

Fig. 3. Trajectory tracking for disturbance case1

Fig. 4. Trajectory tracking errors for disturbance case1

Fig. 5. Velocities for disturbance case1

Fig. 6. Velocity tracking errors for disturbance case1

Fig. 7. Estimation of disturbances for disturbance case 1

Fig. 8. Control inputs for disturbance case 1

Fig. 9. tracking performance index for disturbance case 1

Fig. 10. Trajectory tracking for disturbance case 2

Fig. 11. Trajectory tracking errors for disturbance case 2

Fig. 12. Velocities for disturbance case 2

Fig. 13. Velocity tracking errors for disturbance case 2

Fig. 14. Estimation of disturbances for disturbance case 2

Fig. 15. Control inputs for disturbance case 2
چرا این محصول ارزش خرید دارد؟
- استخراج و پیادهسازی معادلات این مقاله بسیار زمانبر، پیچیده و مستعد خطاست.
- این محصول نسخهٔ آمادهٔ اجرا و سازگار با استانداردهای مقاله را ارائه میدهد.
- ساختار فایلها و کدنویسی کاملاً روشن است و بهراحتی میتوان آن را توسعه، بهینه یا در مقالات جدید استفاده کرد.
- مناسب برای افرادی است که نیاز به شبیهسازی دقیق و قابل استناد دارند.
شاید به موارد زیر نیز علاقه مند باشید:
- تخمین فیلتر کالمن مقاوم از زیردریایی مستقل در حضور خطاهای حسگر
- رویکردی سادهتر برای مدلسازی ماشین DC بدون جاروبک با آهنربای دائم در محیط MATLAB
- طراحی کنترلکننده مد لغزشی زمانثابت برای ردیابی مسیر زیردریاییهای خودران
- کنترل تطبیقی شبکه عصبی برای سامانههای یکپارچه هدایت و کنترل مبتنی بر ناظر اغتشاش
- طراحی کنترلکننده مقاوم تناسبی-(تناسبی-مشتقگیر) برای وسیلهی خودران زیردریایی با استفاده از نظریه بازخورد کمی در صفحه غوطهوری
شبیهسازی کنترل لغزشی ترمینال سریعِ غیرتکین مبتنی بر ناظر اختلال برای وسیلهٔ زیرآبی خودگردان نیمعملکردی در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.