نوشتهها
 https://www.matlabi.ir/wp-content/uploads/2015/05/0b474a212a.jpeg
245
300
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2015-05-09 23:18:542015-05-09 23:18:54شناسایی توابع انتقال ماشین DCبا استفاده از پاسخ پله به کمک الگوریتم ژنتیک
https://www.matlabi.ir/wp-content/uploads/2015/05/0b474a212a.jpeg
245
300
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2015-05-09 23:18:542015-05-09 23:18:54شناسایی توابع انتقال ماشین DCبا استفاده از پاسخ پله به کمک الگوریتم ژنتیک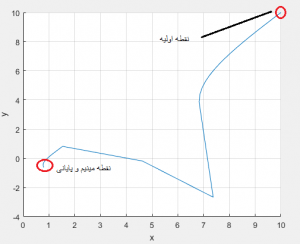 https://www.matlabi.ir/wp-content/uploads/2015/04/38a60c8881.png
244
300
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2015-04-25 23:36:142025-12-08 14:30:11حل تابع با سری تیلور و روش نیوتن در متلب
https://www.matlabi.ir/wp-content/uploads/2015/04/38a60c8881.png
244
300
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2015-04-25 23:36:142025-12-08 14:30:11حل تابع با سری تیلور و روش نیوتن در متلب https://www.matlabi.ir/wp-content/uploads/2015/04/2ca5952757.jpg
173
300
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2015-04-01 22:33:442021-06-26 15:44:34دانلود نرم افزار متلب Mathworks Matlab 2017a
https://www.matlabi.ir/wp-content/uploads/2015/04/2ca5952757.jpg
173
300
حسن یوسفی
https://www.matlabi.ir/wp-content/uploads/2020/05/logo-matlabi.png
حسن یوسفی2015-04-01 22:33:442021-06-26 15:44:34دانلود نرم افزار متلب Mathworks Matlab 2017a