ماشین های القایی متقارن در متلب قسمت دوم
در قسمت اول از آموزش شبیه سازی با متلب در مورد رفتارهای موتور القایی در خدمت شما مواردی را ذکر کردیم, در این قسمت نیز حالتهای دیگری را بوجود و تحلیل خواهیم کرد.
میخواهیم موتور را در ابتدا بی بار راه اندازی کنیم و بعد از اینکه به حالت ماندگار خود رسید توالی فازهای استاتور را عوض کرده و تاثیر آن را روی جریان ها و گشتاور ببینیم.
برای اعمال این تغییرات در متلب به صورت زیر می نویسیم, تفاوت نسبت به برنامه بخش اول آموزش موتور القایی در قسمت رنگ سبز نمایش داده شده است:
clear all
clc
J=.089;
rr=.816;
t=0;
i=0;
dt=.0001;
P=4;
Tl=11.9/2;
Te=0;
tet0=0;tetr0=0;tet=0;tetr=0;
rs=.435;
Wr0=0;
Xlr=.754;
Xls=.754;
Wb=120*pi;
Xm=26.13;
Xss=Xls+Xm;
Xrr=Xlr+Xm;
D=(Xss*Xrr)-(Xm^2);
vqr=0;vdr=0;vor=0;
Q0=[0;0;0;0;0;0];
Qqs=0;Qds=0;Qos=0;Qqr=0;Qdr=0;Qor=0;
while t<=3
Vas=220*(.8165)*cos(Wb*t);
Vbs=220*(.8165)*cos((Wb*t)-(2*pi/3));
Vcs=220*(.8165)*cos((Wb*t)+(2*pi/3));
if t>=1
Vas=220*(.8165)*cos(Wb*t);
Vbs=220*(.8165)*cos((Wb*t)+(2*pi/3));
Vcs=220*(.8165)*cos((Wb*t)-(2*pi/3));
end
Ks=(2/3)*[cos(tet0) cos((tet0)-(2*pi/3)) cos((tet0)+(2*pi/3));sin(tet0) sin((tet0)-(2*pi/3)) sin((tet0)+(2*pi/3));.5 .5 .5];
V1=Ks*[Vas;Vbs;Vcs];
vqs=V1(1,1);vds=V1(2,1);vos=V1(3,1);
Q=[Qqs;Qds;Qos;Qqr;Qdr;Qor];
V=[vqs;vds;vos;vqr;vdr;vor];
Wr=Wr0;
W=Wr;
A=[rs*Xrr/D (W/Wb) 0 (-rs*Xm/D) 0 0;(-W/Wb) rs*Xrr/D 0 0 -rs*Xm/D 0;0 0 rs/Xls 0 0 0;-rr*Xm/D 0 0 rr*Xss/D (W-Wr)/Wb 0;0 (-rr*Xm/D) 0 (-(W-Wr)/Wb) rr*Xss/D 0;0 0 0 0 0 rr/Xlr];
B=[1/Wb 0 0 0 0 0;0 1/Wb 0 0 0 0;0 0 1/Wb 0 0 0;0 0 0 1/Wb 0 0;0 0 0 0 1/Wb 0;0 0 0 0 0 1/Wb];
Brev=inv(B);
Arev=-inv(B)*A;
Q01=Arev*Q+Brev*V;
Te=(P/2)*(3/2)*(Xm/(D*Wb))*((Q(1,1)*Q(5,1))-(Q(2,1)*Q(4,1)));
Wr01=(P/2)*((Te-Tl)/J);
tet01=W;
tetr01=Wr;
Wr=Wr0+(Wr01*dt/2);
tet=tet0+(tet01*dt/2);
tetr=tetr0+(tetr01*dt/2);
Q=Q0+(Q01*dt/2);
Q02=Arev*Q+Brev*V;
Te=(P/2)*(3/2)*(Xm/(D*Wb))*((Q(1,1)*Q(5,1))-(Q(2,1)*Q(4,1)));
Wr02=(P/2)*((Te-Tl)/J);
Wr=Wr0+(Wr02*dt/2);
W=Wr;
tet02=W;
tetr02=Wr;
tet=tet0+(tet02*dt/2);
tetr=tetr0+(tetr02*dt/2);
Q=Q0+(Q02*dt/2);
Q03=Arev*Q+Brev*V;
Te=(P/2)*(3/2)*(Xm/(D*Wb))*((Q(1,1)*Q(5,1))-(Q(2,1)*Q(4,1)));
Wr03=(P/2)*((Te-Tl)/J);
Wr=Wr0+(Wr03*dt);
W=Wr;
tet03=W;
tetr03=Wr;
tet=tet0+(tet03*dt);
tetr=tetr0+(tetr03*dt);
Q=Q0+(Q03*dt);
Q04=Arev*Q+Brev*V;
Te=(P/2)*(3/2)*(Xm/(D*Wb))*((Q(1,1)*Q(5,1))-(Q(2,1)*Q(4,1)));
Wr04=(P/2)*((Te-Tl)/J);
Wr0=Wr0+(Wr01+2*Wr02+2*Wr03+Wr04)*(dt/6);
W=Wr0;
tet04=W;
tetr04=Wr;
tet0=tet0+(tet01+2*tet02+2*tet03+tet04)*(dt/6);
tetr0=tetr0+(tetr01+2*tetr02+2*tetr03+tetr04)*(dt/6);
Q0=Q0+(Q01+Q02*2+2*Q03+Q04)*(dt/6);
Qqs=Q0(1,1);Qds=Q0(2,1);Q0s=Q0(3,1);Qqr=Q0(4,1);Qdr=Q0(5,1);Q0r=Q0(6,1);
Te=(P/2)*(3/2)*(Xm/(D*Wb))*((Q(1,1)*Q(5,1))-(Q(2,1)*Q(4,1)));
I=(1/D)*[Xrr 0 0 -Xm 0 0;0 Xrr 0 0 -Xm 0;0 0 D/Xls 0 0 0;-Xm 0 0 Xss 0 0;0 -Xm 0 0 Xss 0;0 0 0 0 0 D/Xlr]*Q;
iqs=I(1,1);ids=I(2,1);ios=I(3,1);iqr=I(4,1);idr=I(5,1);ior=I(6,1);
Kr=(2/3)*[cos((tet0-tetr0)) cos(((tet0-tetr0))-(2*pi/3)) cos(((tet0-tetr0))+(2*pi/3));sin((tet0-tetr0)) sin(((tet0-tetr0))-(2*pi/3)) sin(((tet0-tetr0))+(2*pi/3));.5 .5 .5];
Irotor=inv(Kr)*[iqr;idr;ior];
iar=Irotor(1,1);ibr=Irotor(2,1);icr=Irotor(3,1);
Ks=(2/3)*[cos(tet0) cos((tet0)-(2*pi/3)) cos((tet0)+(2*pi/3));sin(tet0) sin((tet0)-(2*pi/3)) sin((tet0)+(2*pi/3));.5 .5 .5];
Istator=inv(Ks)*[iqs;ids;ios];
ias=Istator(1,1);ibs=Istator(2,1);ics=Istator(3,1);
i=i+1;
time(i)=t;
Iar(i)=iar;
Tee(i)=Te;
Ias(i)=ias;
WW(i)=(30*Wr0)/(2*pi);
t=t+.0001;
if t>=1.5
Tl=11.9;
end
end
plot(time,WW);xlabel(‘t’) ;ylabel(‘Wr’)
grid on
figure
plot(time,Ias);xlabel(‘t’) ;ylabel(‘ias’)
grid on
figure
plot(time,Iar);xlabel(‘t’) ;ylabel(‘iar’)
grid on
figure
plot(time,Tee);xlabel(‘t’) ;ylabel(‘Te’)
grid on
figure
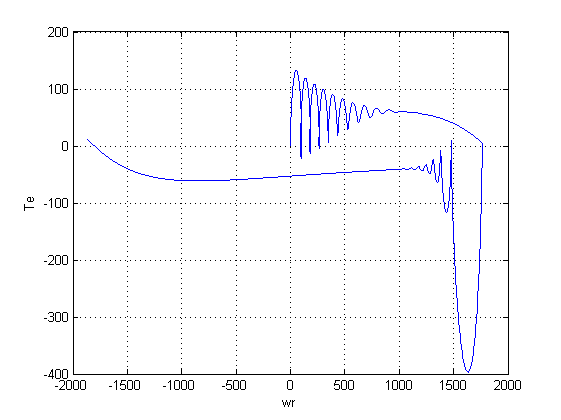
plot(WW,Tee);xlabel(‘wr’) ;ylabel(‘Te’)
grid on
نتایج را بررسی می کنیم:

می بینیم که در لحظه ی تغییر فاز سرعت برعکس می شود و این اولین نتیجه ی مهم این تغییرات در کدهای متلب است.
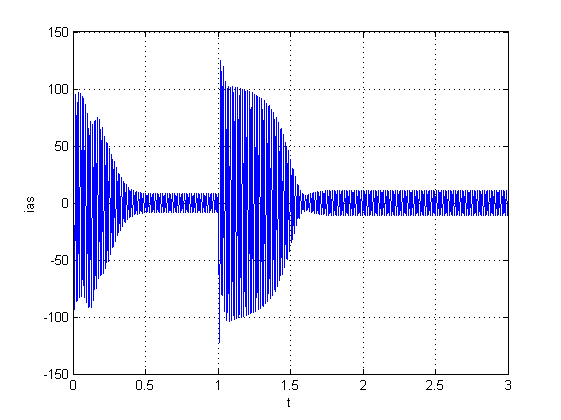
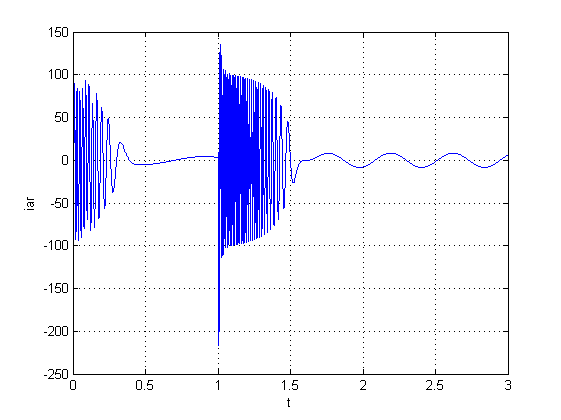
وقتی جریان استاتور و روتور را بررسی می کنیم متوجه می شویم چقدر در لحظه ی تغییر نوسانات شدیدی را از خود نشان می دهد.
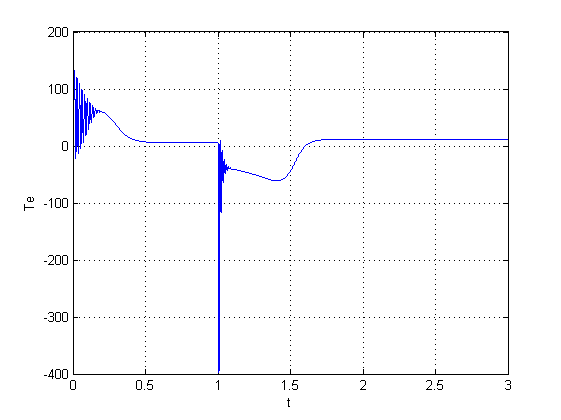
معکوس شدن گشتاور در لحظه ی تغییر هم جالب توجه است.
- انجام پروژه متلب با سایت متلبی










{kind=link}
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.