توضیحات
برنامهریزی مسیر بهینه زمانی یک ربات با ۶ درجه آزادی بر اساس الگوریتم ژنتیک بهبودیافته
A 6‑DOF robot‑time optimal trajectory planning based on an improved genetic algorithm
یک برنامه ریزی بهینه برای ربات با زمان 6درجه آزادی بر اساس الگوریتم ژنتیک بهبود یافته
شبیه سازی در محیط ام فایل متلب و با الگوریتم ژنتیک انجام شده است.
دارای گزارش 4 صفحه در قالب ورد است.
ترجمه تخصصی چکیده مقاله:
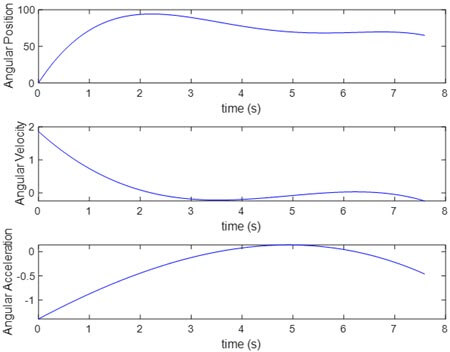
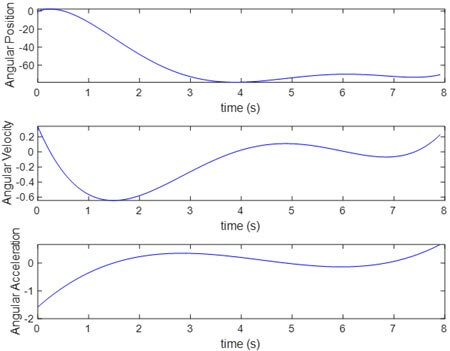
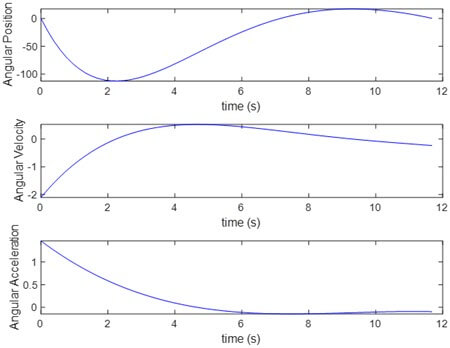
با استفاده از تابع چندجملهای مرتبه پنجم (Quintic Polynomial) برای درونیابی چند نقطه تعیینشده از مسیر هر مفصل ربات، روابط ریاضی متغیرهای هر مفصل برحسب زمان استخراج میشوند. بهمنظور بهبود عملکرد الگوریتم جستوجو، عملگرهای ترکیب (crossover) و جهش (mutation) در الگوریتم ژنتیک بهصورت بهینهشده با فرم کسینوسی اصلاح شدهاند. علاوه بر این، الگوریتم ژنتیک تطبیقی بهبودیافته برای بهینهسازی بازههای زمانی بین نقاط درونیابی هر مفصل بهکار گرفته شده است تا برنامهریزی مسیر بهینه زمانی محقق شود. همچنین، شبیهسازی در محیط MATLAB انجام شده و نتایج نشان میدهند که روش پیشنهادی در این مقاله زمان اجرای وظایف ربات را کاهش میدهد. در عین حال، منحنیهای موقعیت زاویهای، سرعت و شتاب هر مفصل دارای نرمی و پیوستگی کافی هستند که این امر تضمین میکند ربات وظایف خود را بهصورت پایدار و کارآمد انجام دهد.
توضیحات پروژه
در اینجا در مورد فایلهای شبیه سازی با متلب توضیحاتی را ارائه می نماییم:
در پوشه simulation محتویات زیر وجود دارد:
- پوشه genetic algorithm که شامل کدهای الگوریتم ژنتیک است. توضیحات مقاله در مورد خود روش کم و صرفا یک فلوچارت داده شده . با این حال سعی شده که مجموعه کد مناسب جهت انجام محاسبات نوشته شود. هم چنین توابع مختلف برای آن در نظر گرفت تا هر بخش از محاسبات به صورت مجزا و خلاصه قابل فهم گردد.
- پوشه problem functions که قسمت اصلی پروژه را شامل می شود و توضیحات گزارش به آن اختصاص دارد.
- فایل main که اجرای شبیه سازی با آن انجام می گیرد. حتما هنگام اجرای این فایل گزینه Change Folder را باید انتخاب نمایید.
نکته بسیار مهم: تعداد پارامترها در این مساله بهینه سازی 36 است. در نتیجه محاسبات زمان بر است و در برخی اجراها ممکن است با پیغام no feasible point found و نمودارهای نامناسب روبرو شوید. لذا مجددا برنامه را اجرا نمایید تا جوابهای مناسب ظاهر گردد.
در پوشه problem function دو کد وجود دارد:
- تابع fitnessFunction که تابع معیار فرمول 14 مقاله در آن نوشته شده است.
- تابع pathConstraintt که قیود و محاسبات اصلی در آن قرار دارند و بحث اصلی این گزارش است.
نتایج شبیه سازی با متلب
شاید به موارد زیر نیز علاقه مند باشید:
- آموزش و دانلود الگوریتم ژنتیک
- خوشه بندی با الگوریتم ژنتیک
- تشخیص عیب برای سیستم های LPV گسسته با استفاده از مشاهده کننده فاصله زمانی
- استخراج حداکثر انرژی بادی با استفاده از تخمین شبکه عصبی و کنترل پیشبین مبدل بوست
کلیدواژه:
Industrial robot, Trajectory planning, Adaptive genetic algorithm (AGA), Time optimal
شبیه سازی برنامهریزی مسیر بهینه زمانی یک ربات با ۶ درجه آزادی بر اساس الگوریتم ژنتیک بهبودیافته با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.