توضیحات
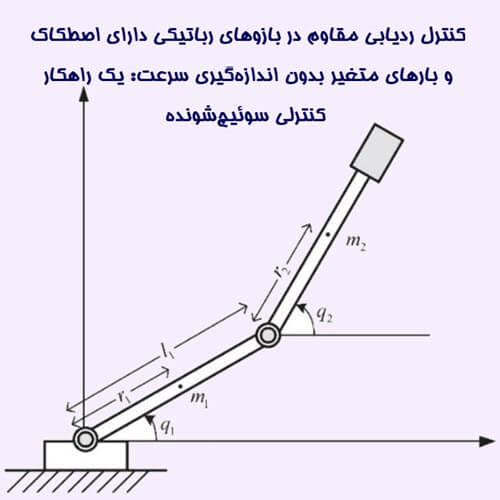
کنترل ردیابی مقاوم در بازوهای رباتیکی دارای اصطکاک و بارهای متغیر بدون اندازهگیری سرعت: یک راهکار کنترلی سوئیچشونده
عنوان اصلی مقاله:
Robust tracking control of robot manipulators with friction and variable loads without velocity measurement: A switched control strategy
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 4 صفحه ای می باشد.
ترجمه چکیده مقاله
این مقاله به موضوع کنترل ردیابی مقاوم بر پایه سازگار (Adaptive-Based Robust Tracking Control) برای بازوهای رباتیکی میپردازد که تحت اصطکاک غیرخطی و تغییرات متناوب بارهای نامعلوم عمل میکنند، در حالیکه اندازهگیری سرعت در دسترس نیست. ابتدا یک مدل غیرخطی سوئیچشونده ارائه میشود که اثرات اصطکاک و تغییرات پارامتری ناشی از تغییر بار را توصیف میکند. سپس تحت تغییرات دلخواه بار، یک کنترلکننده سازگار H∞ طراحی میشود تا ردیابی موقعیت لینک را در حضور عدم قطعیتها و اغتشاشات خارجی تضمین کند.
پس از آن، برای اغتشاشات خارجی کراندار، یک راهبرد جدید کنترل ردیابی سازگار مقاوم با خروجی معرفی میشود که تضمین میکند تمامی سیگنالهای حلقه بسته کراندار باقی میمانند و خطای ردیابی به صفر همگرا میشود. برخلاف بسیاری از مطالعات پیشین، الگوریتمهای پیشنهادی نیازمند اندازهگیری سرعت نیستند و پارامترهای سوئیچشونده و اغتشاشات نامعلوم نیز نیازی به تناوب، ساختار خاص یا کرانهای معلوم ندارند. یک مطالعه شبیهسازی نیز ارائه شده است تا ویژگیهای اثباتشده روش پیشنهادی نشان داده شود.
توضیحات پروژه رباتیک – کنترل مقاوم سوئیچشونده
مقاله یک ساختار کنترل ردیابی مقاوم با خروجی (Robust Adaptive Output Feedback) را برای رباتهای دو درجه آزادی تحت اصطکاک غیرخطی، بارهای متغیر و عدم دسترسی به اندازهگیری سرعت ارائه میکند. در این پروژه، کلیه معادلات، مدلسازیها، رویتگر، قوانین کنترل و روابط سوئیچینگ مطابق مقاله، بهصورت دقیق در قالب فایلهای m-file پیادهسازی شدهاند.
محتویات بسته شبیهسازی
پوشه simulation شامل فایلهای زیر است:
۱. فایل sw.mat
این فایل شامل دادههای دقیق سوئیچینگ استخراجشده از شکلهای ۳ و ۴ مقاله است.
در مقاله فرمول مشخصی برای تولید این سیگنال ارائه نشده و نویسندگان تنها یک توضیح کلی دادهاند.
بنابراین، بهترین و دقیقترین راه برای دستیابی به نتایج نزدیک به مقاله، استفاده از همین دادهها در قالب sw.mat است.
۲. فایل case1_equations.m
پیادهسازی تمام معادلات حالت اول (Case 1) شامل:
- تعریف DDQ و مقداردهی اولیه
- نامگذاری متغیرهای حالت
- پیادهسازی کامل پارامترهای دینامیک طبق مقاله
- بازنویسی و اصلاح پارامترهای کنترلر (به دلیل ابهامات مقاله)
- بارگذاری سیگنال سوئیچینگ و میانیابی آن
- پیادهسازی پارامترهای جدول ۱
- اعمال اغتشاش d(t) و تبدیل آن به ω طبق مقاله
- پیادهسازی دقیق معادلات
- پیادهسازی رویتگر سرعت (High-Gain Observer)
- پیادهسازی قانون کنترل اصلاحشده (چون نسخه چاپ شده مقاله دارای خطا بود)
نکته مهم:
در چندین معادله کلیدی (خصوصاً 7 و 11) مقاله دارای خطاهای تایپی و مفهومی است. در این پروژه تمامی این موارد اصلاح و نسخه صحیح آنها پیادهسازی شده است.
۳. فایل case2_equations.m
پیادهسازی کامل حالت دوم (Case 2)
۴. فایل main.m
فایل اصلی اجرای شبیهسازی:
- بارگذاری دادههای سوئیچینگ
- حل دینامیک هر دو حالت (Case 1 و Case 2)
- تعریف سیگنالهای مرجع
- رسم شکلها مطابق محدودههای مقاله
- تنظیم جداول و نمودارها برای بیشترین شباهت با نتایج مقاله
نتایج شبیهسازی
نتایج بدست آمده از شبیه سازی شامل شکلهای 3 و 4 می باشد, که در زیر آنها را مشاهده می نمایید:

Figure 3. Time history of simulation results of case 1: (a) tracking error, (b) control effort, and (c) switching signal
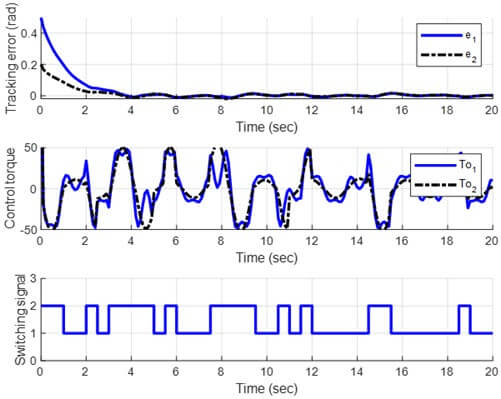
Figure 4. Time history of simulation results in case 2: (a) tracking error, (b) control effort, and (c) switching signal
- تغییرات پارامترها تقریباً همسان مقاله است.
- ورودیهای کنترلی نیز روندی یکسان با نتایج مقاله دارند.
- تنها تفاوت قابل مشاهده: بازه نمودارهای ورودی کنترلی کمی بزرگتر از مقاله است.
- با توجه به یکسانسازی کامل معادلات و دادهها، احتمال میرود نویسندگان مقاله در شکلهای مربوط به ورودی کنترلی دست به کوچکنمایی یا اصلاح بصری زده باشند.
ویژگیهای کلیدی این پروژه
- پیادهسازی کامل معادلات دینامیکی و کنترل مقاوم سوئیچشونده
- استفاده از داده حقیقی سوئیچینگ استخراجشده از مقاله
- اجرای شبیهسازی کامل Case 1 و Case 2
- بدون نیاز به اندازهگیری سرعت (استفاده از رویتگر High-Gain)
مناسب برای چه افرادی؟
این بسته برای پژوهشگران و مهندسانی مناسب است که:
- روی کنترل مقاوم، کنترل تطبیقی، سیستمهای سوئیچشونده، رباتیک کار میکنند.
- قصد تکرار نتایج مقالات یا توسعه کنترلرهای مقاوم را دارند.
- به یک نسخه کاملاً اجرایی از مقاله نیاز دارند.
شاید به موارد زیر نیز علاقه مند باشید:
- یکسوساز پنجسطحی باک PFC خودمتعادل برای شارژر خودروهای برقی
- انتخاب پیش فرض یک ورژن متلب از بین چند ورژن متلب
- طراحی یک کنترلکننده مد لغزشی زیربهینه مرتبه دوم انتگرالی برای کنترل حرکتی مقاوم بازوهای رباتیک
- فیدبک خروجی با تأخیر زمانی عملیات دور دوطرفه با تخمین نیرو برای n درجه آزادی بازوهای غیرخطی
شبیهسازی کنترل ردیابی مقاوم در بازوهای رباتیکی دارای اصطکاک و بارهای متغیر بدون اندازهگیری سرعت: یک راهکار کنترلی سوئیچشونده در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.