
توضیحات
جبران تأخیر زمانی در تلهاپریشن غیرخطی دوطرفه: یک رویکرد پیشبینی حرکت
عنوان اصلی مقاله:
Time delay compensation for nonlinear bilateral teleoperation: A motion prediction approach
شبیه سازی در محیط ام فایل و سیمولینک متلب 2018b انجام شده است.
دارای گزارش 8 صفحه ای ورد می باشد.
دارای گزارش ویدیویی 16 دقیقه ای می باشد.
تلهاپریشن (Teleoperation) به معنی هدایت و کنترل از راه دور ماشینها و رباتها است
ترجمه چکیده:
این مقاله به مسئله جبران تأخیر زمانی در سیستمهای تلهاپراسیون غیرخطی میپردازد. یک روش نوین پیشبینی حرکت پیشنهاد شده است که بر پایه مشاهدهگر حالت با ساختار آبشاری طراحی گردیده است. در این رویکرد، موقعیتهای واقعی ربات مستر در سمت ربات اسلیو با استفاده از دادههای تأخیردار اندازهگیریها برآورد میشوند. خطاهای پیشبینی تحت مجموعهای مناسب از فرضیات مربوط به عدم قطعیتهای سیستم، کراندار باقی میمانند. علاوه بر این، یک قضیه اساسی برای طراحی کنترلکننده اسلیو ارائه میشود تا بازیابی عملکرد سیستم حلقهبسته همراه با مشاهدهگر آبشاری نشان داده شود. با استفاده از مقادیر پیشبینیشده، تأخیر زمانی در کانال روبهجلو بهطور مؤثری در طراحی کنترلکننده ربات اسلیو جبران میگردد. برای تأیید کارایی روش پیشنهادی، شبیهسازیها انجام شده و نتایج پیشبینی از طریق مقایسه با دو نوع دیگر از پیشبینهای آبشاری برجسته شده است.
توضیحات پروژه جبران تاخیر زمانی
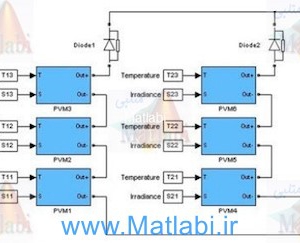
در این پروژه، شبیهسازی مقالهی “Time delay compensation for nonlinear bilateral teleoperation: A motion prediction approach” در محیط MATLAB/Simulink پیادهسازی شده است. هدف اصلی، جبران تأخیر زمانی در سیستمهای تلهاپراسیون غیرخطی دوطرفه (master–slave) میباشد.
روش پیشنهادی مقاله مبتنی بر مشاهدهگر آبشاری (Cascade Observer) برای پیشبینی موقعیت واقعی ربات مستر است که امکان کنترل دقیقتر ربات اسلیو را فراهم میکند. نتایج شبیهسازی نشان میدهد این روش توانسته عملکرد سیستم حلقهبسته را بازیابی کرده و دقت ردیابی موقعیت را در حضور تأخیر زمانی بهبود دهد.
شبیه سازی شامل 6 پوشه است که نام آن بیانگر بدست آوردن شکل های متناظر در مقاله است.
در گزارش ورد توضیحات در مورد شبیه سازی هر پوشه و تشریح هر بخش از سیمولینک است.
در گزارش ویدیویی نیز شبیه سازی با توجه به مقاله توضیح داده شده و بخش های مختلف سیمولینک نیز توضیح داده شده است, همچنین در نهایت با ران شبیه سازی, نتایج نیز بررسی شده است. در این گزارش مفروضات شبیه سازی نیز بیان شده است.
نتایج شبیه سازی با متلب:

Figure 3. The human force input.

Figure 4. Prediction results of qm

Figure 5. Prediction results of human force

Figure 6. Tracking performance of teleoperation system.

Figure 7. Prediction error with different l

Figure 8. Prediction error with different m

Figure 9. Comparison results of different observers

Figure 10. Human force input with mathematical model (55).

Figure 11. Position predictions with Human force input (55).

Figure 12. PD-controller-like human force input

Figure 13. Position predictions with PD-like human force input.
همانطور که مشاهده می شود نتایج مطلوبی بدست آمده است.
شاید به موارد زیر نیز علاقه مند باشید:
- فیدبک خروجی با تأخیر زمانی عملیات دور دوطرفه با تخمین نیرو برای n درجه آزادی بازوهای غیرخطی
- کنترل تطبیقی عملکرد از راه دور دو کاربره با در نظر گرفتن تأخیر زمانی و عدم قطعیت دینامیکی
- استفاده از رویکرد شبکة عصبی مصنوعی جهت پیشبینی کوتاهمدت سرعت باد
- کنترل پیشبینی مدل حداقل حداکثری خود راهانداز مقاوم برای سیستمهای غیرخطی زمان گسسته
شبیهسازی مقاله جبران تأخیر زمانی در تلهاپریشن غیرخطی دوطرفه: یک رویکرد پیشبینی حرکت با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.