طراحی و شبیه سازی درایو موتور رلوکتانس سوییچی با متلب
بسم الله الرحمن الرحیم
طراحی و شبیه سازی درایو موتور رلوکتانس سوییچی
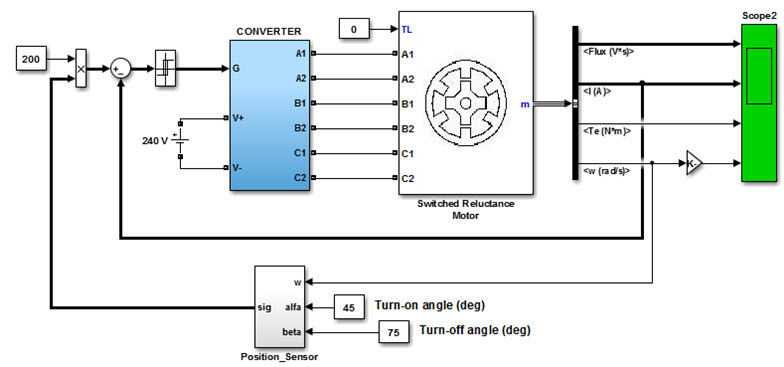
سیستم سیمولینک شده در متلبِ زیر یک درایو SRM 60 کیلووات 4/6 کنترل شده با جریان را با استفاده از مدل خاص SRM بر مبنای منحنی مغناطیس کنندگی اندازه گیری شده نشان می دهد.
توصیف:
SRM به وسیله یک مبدل قدرت نامتقارن سه فاز که دارای سه ساق است، تغذیه می شود.
که هر کدام شامل دو IGBT و دو دیود هرزگرد است.
در طول دوره هدایت، IGBTهای روشن با اعمال منبع ولتاژ مثبت به سیم پیچ های استاتور، جریان مثبت را به سیم پیچ های فاز تحریک میکنند.
در طول دوره هرزگردی، ولتاژ منفی به سیم پیچها اعمال می شود و انرژی ذخیره شده، از طریق دیودها به منبع توان DC بازمی گردد.
در نتیجه زمان افت جریان در سیم پیچ موتور می تواندکاهش یابد. با استفاده از یک سنسور موقعیت که به روتور متصل است، زاویههای روشن و خاموش بودن فازهای موتور را می توان با دقت تحمیل نمود.
این زاویه سوئیچینگ می تواند برای کنترل شکل موج گشتاور، مورد استفاده قرار بگیرد.
جریان های فاز به طور مستقل به وسیله سه کنترلر هیسترزیس که سیگنال های درایو IGBT ها را با مقایسه جریان اندازه گیری شده با مقدار مرجع تولید می کنند، کنترل می شوند.
فرکانس سوئیچینگ IGBT ها به طور عمده به وسیله باند هیسترزیس تعیین می شود.
شبیه سازی با متلب:
در این سیستم، از یک منبع ولتاژ 240 ولت DC استفاده شده است.
در محدوده سرعت، زاویه های روشن و خاموش شدن مبدل به ترتیب در مقادیر 45 درجه و 75 درجه ثابت شده اند.
جریان مرجع معادل 200 آمپر و باند هیسترزیس به صورت 10-+ انتخاب شده است.
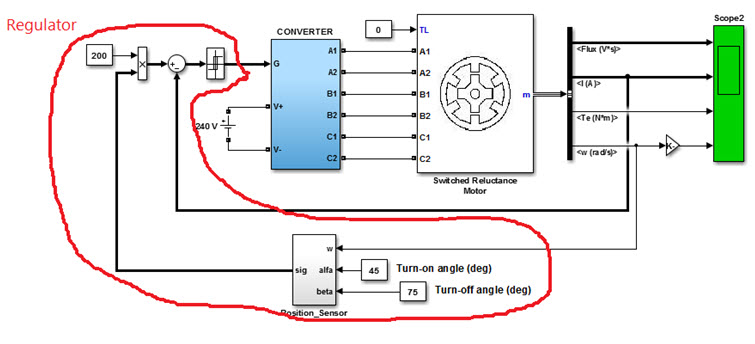
SRMبا اعمال پله مرجع به ورودی رگولاتور، راه اندازی می شود. نرخ شتاب به مشخصههای بار وابسته است.
برای کوتاه نمودن زمان راه اندازی، یک بار بسیار سبک انتخاب شده است.
از آنجا که تنها جریان ها کنترل شده اند، سرعت موتور با توجه به دینامیک های مکانیکی سیستم افزایش خواهد یافت.
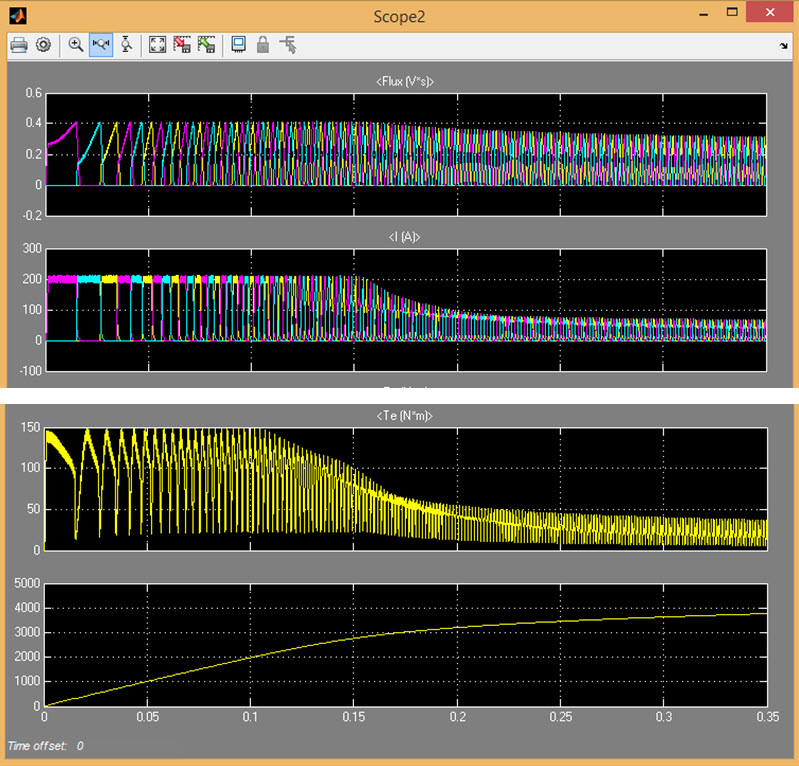
شکل موج های درایو SRM (ولتاژ فاز، شار مغناطیسی، جریان های سیم پیچ، گشتاور موتور، سرعت موتور) بر روی اسکوپ مطابق نمودارهای زیر نمایش داده شده است.
همانطور که مشاهده می شود، گشتاور SRM دارای ریپل گشتاور بسیار بالایی است که این به علت انتقال جریان های یک فاز به فاز دیگر است.
این ریپل گشتاور، یک مشخصه خاصی از SRM است که عمدتا به زاویه های روشن و خاموش شدن مبدل وابسته است.
باتوجه به مشاهده شکل موج های درایو، ما می توانیم بگوئیم که رنج سرعت عملکرد SRM، با توجه به مود عملکرد مبدل، می تواند به دو بخش تقسیم گردد: جریان کنترل شده و ولتاژ تغذیه شده.
مود جریان کنترل شده:
تا سرعت حدود 3000 دور در دقیقه، emf موتور کم است و جریان می تواند در مقدار مرجع تنظیم شود.
در این مود عملکرد، مقدار متوسط گشتاور تقریبا متناسب با مرجع جریان است.
علاوه بر ریپل گشتاور به علت انتقال فاز، توجه داشته باشید که ریپل گشتاور، به وسیله سوئیچینگ هسیترزیس رگولاتور نیز ایجاد می گردد.
این مود عملکرد، مود گشتاور ثابت نیز نامیده می شود.
مود ولتاژ تغذیه شده:
برای سرعت های بالاتر از 3000 دور در دقیقه، emf موتور بالا است و جریان های فاز نمی تواند به مقدار مرجع اعمال شده به وسیله تنظیم کننده جریان برسند.
عملکرد مبدل به طور طبیعی به حالت ولتاژ تغذیه شده که در آن هیچ مدولاسیون کلیدهای قدرت وجود ندارد، تغییر می کند.
آنها در طول دوره فعال خود و مادامی که منبع ولتاژDC ثابت به سیم پیچ فاز اعمال می شود، بسته باقی می مانند.
در مود ولتاژ تغذیه شده، SRM، مشخصه طبیعی خود را دارد که در آن مقدار متوسط گشتاور با سرعت موتور، رابطه معکوس دارد.
از آنجا که تنظیم کننده هیسترزیس در این مود غیر فعال است، ریپل گشتاور تنها به علت انتقال فاز می باشد.
بهینه سازی مشخصه گشتاور – زاویه سوئیچینگ وفقی:
در درایوهایSRM، هر دو گشتاور متوسط و ریپل گشتاور، به وسیله زاویه های روشن و خاموش بودن و شکل موج جریان در فازهای موتور تحت تاثیر قرار می گیرند. و این مشخصه ها به صورت تابعی از سرعت موتور تغییر می کنند.
در بسیاری از کاربردها، به عنوان مثال در درایو خودروهای الکتریکی، بسیار مطلوب است که بالاترین مقدار نسبت گشتاور به آمپر و کم ترین ریپل گشتاور و تا حد امکان در یک رنج وسیع باشد.
مشخصه گشتاور SRM به صورت تابعی از جریان و سرعت موتور می تواند به وسیله یک پیش محاسباتی برای تعیین زاویه روشن و خاموش بودن، بهینه گردد.
توضیحی بر مبدل درایو SRM :
از آنجا که گشتاور در درایوهای SRM مستقل از قطب فعلی تحریک است، درایوهای SRM تنها به یک سوئیچ در هر سیم پیچ فاز نیاز دارند.
این بر خلاف درایوهای موتور AC است که در آن حداقل دو سوئیچ برای هر فاز جهت کنترل جریان، مورد نیاز است.
علاوه بر این، در درایوهای موتورAC ، سیم پیچ ها با سوئیچ ها سری نیستند.
که این مساله منجر به آسیب جبران ناپذیر در اثر خطای ساق[1] می شود. در درایوهایSRM ، همیشه یک سیم پیچ فاز سری با یک سوئیچ است.
در هنگام وقوع یک خطای ساق، اندوکتانس سیم پیچ، نرخ افزایش جریان را محدود می نماید و زمان لازم را برای عملکرد رله حفاظتی جهت ایزوله نمودن خطا، فراهم می کند.
فازهای SRM مستقل ازهم هستند و در صورت خطای یک سیم پیچ، درایو موتور می تواند به عملکرد خود بدون وفقه ادامه دهد،گرچه توان خروجی کاهش خواهد یافت.
رایج ترین رویکرد برای تأمین انرژی یک موتور سوئیچ رلوکتانس، استفاده از یک مبدل پل نامتقارن مطابق شکل زیر است.
سه فاز در یک مبدل پل نامتقارن وجود دارد که به فازهای موتور سوئیچ رلوکتانس مربوط می شوند.
اگر هر دو سوئیچ قدرت در دو طرف فاز روشن شود، آنگاه فاز مربوطه باید فعال شود.
زمانی که جریان به مقداری بالاتر از مقدار تعیین شده افزایش یافته، سوئیچ باید خاموش شود.
انرژی که در حال حاضر در سیم پیچ موتور ذخیره شده، باید تا زمانی که انرژی تخلیه شود، به طریقی مشابه، جریان را حفظ کند.

[1] shoot-through faults
برای دریافت فایل سیمولینک از قسمت زیر اقدام نمایید:










{kind=link}
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.