توضیحات
Acceleration estimation method and sliding mode control design for car-following distance control
ترجمه فارسی موضوع مقاله: روش برآورد شتاب و طراحی کنترل مد لغزشی برای کنترل از راه دور ماشین
طراحی کنترل مد لغزشی به منظور حفظ فاصله تعقیب ماشین
چکیده: مسئله کنترل فاصله تعقیب وسیله نقلیه یک مسئله مهم در سیستمهای کروز خودکار میباشد. در این گزارش، از روش کنترلی مد لغزشی جهت تعقیب و حفظ فاصله وسیله نقلیه مورد نظر از وسیله مرجع استفاده شده است. نتایج شبیهسازی با استفاده از نرم افزار MATLAB ارائه شده است.
روش کنترلی
شبیه سازی بر اساس روش کنترلی ارائه شده در مرجع [1] میباشد. در این مرجع از معادلات دینامیکی وسیله نقلیه در ارائه روش کنترلی صرف نظر شده است و فرض شده است که حلقه کنترل داخلی آن به شکل ایدهآل عمل میکند و فقط روش مد لغزشی برای استخراج ورودی شتاب برای دینامیک وسیله نقلیه استفاده شده است.
سطح لغزشی بر اساس روابط زیر تعریف شده است
…
ورودی کنترلی شتاب به ضورت زیر طراحی شده است
…
با توجه به اینکه ضرایت کنترلی در مقاله اشاره نشده است، ضرایب به صورت زیر انتخاب شده اند
نتایج شبیه سازی
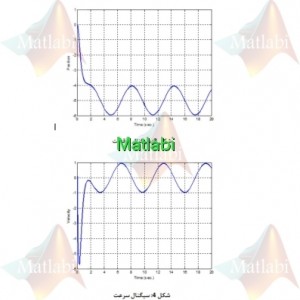
به منظور شبیه سازی یک مسیر سینوسی با دامنه 1 حول مبدأ برای وسیله مرجع درنظر گرفته شده است که با توجه به اندازه انتظار میرود وسیله مورد نظر با فاصله 5 عقبتر از آن حرکت کند. بلوک دیاگرام شبیهسازی شده در محیط Simulink به صورت زیر میباشد
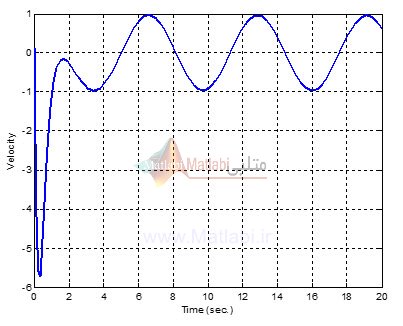
سیگنالهای خطا، موقعیت و سرعت در زیر نشان داده شده است.
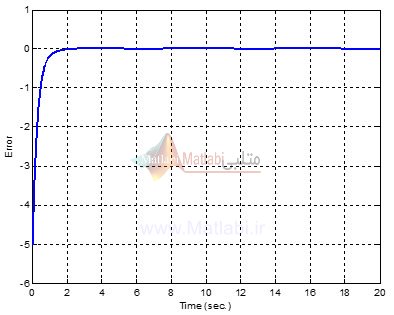
شکل 1: سیگنال خطا
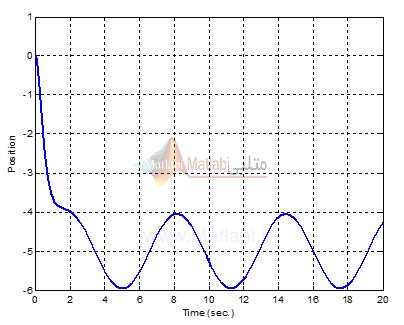
شکل 2: سیگنال موقعیت
طراحی کنترل مد لغزشی به منظور حفظ فاصله تعقیب ماشین
Tracking-differentiator, Acceleration estimation, sliding mode control, car-following distance
شبیه سازی مقاله Acceleration estimation method and sliding mode control design for car-following distance control
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.