توضیحات
شبیه سازی همزمان سازی سیستم آشوب لورنز با مشاهدهگر غیرخطی در متلب
این پروژه با الهام از مقاله ارائهشده:
Control of chaotic systems with uncertain parameters and stochastic disturbance by LMPC
پروژه حاضر با الهام از چارچوب نظری مقاله مذکور، به بررسی همزمانسازی و تخمین حالت سیستم آشوب لورنز در حضور نویز اندازهگیری میپردازد.
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 21 صفحه ای می باشد.
معرفی پروژه
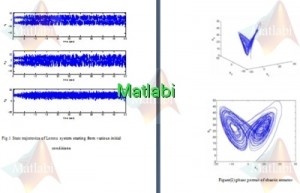
در این پروژه، یک سیستم آشوبناک چهارحالته با ساختار توسعهیافته مبتنی بر مدل کلاسیک Lorenz system در محیط MATLAB شبیهسازی شده است.
هدف اصلی پروژه:
✔ تولید رفتار آشوبناک واقعی
✔ افزودن نویز تصادفی به اندازهگیریها
✔ طراحی مشاهدهگر غیرخطی
✔ بررسی همگرایی خطای تخمین
✔ تحلیل همزمانسازی سیستم آشوب در حضور اغتشاش
این پروژه برای درسهای:
- کنترل غیرخطی
- سیستمهای دینامیکی
- فرآیندهای تصادفی
- کنترل آشوب
کاملاً مناسب است.
ساختار سیستم شبیه سازی شده
سیستم مورد بررسی شامل چهار حالت دینامیکی است:
x_1, x_2, x_3, x_4
پارامترهای سیستم:
- a = 10
- b = 8/3
- c = 28
- r = -1
- T = 0.001
- N = 20000
مدل به صورت گسسته و با روش انتگرالگیری اویلر پیادهسازی شده است.
افزودن نویز اندازهگیری
برای شبیهسازی شرایط واقعی، نویز تصادفی به خروجیها اضافه شده است:
y1(k)=x1(k)+rand(1);
y2(k)=x2(k)+rand(1);
y3(k)=x3(k)+rand(1);
y4(k)=x4(k)+rand(1);
این بخش نشان میدهد که:
- اندازهگیریها دقیق نیستند
- نویز تصادفی روی خروجی وجود دارد
- مشاهدهگر باید بتواند حالات واقعی را بازسازی کند
طراحی مشاهدهگر غیرخطی
برای تخمین حالات سیستم از ساختار زیر استفاده شده است:
![]()
که در آن:
- L1 ، L2 ، L3 ، L4 بهرههای مشاهدهگر هستند
- مقدار پیشفرض در کد: L = 1
این ساختار مشابه مشاهدهگر لونبرگر توسعهیافته برای سیستم غیرخطی است.
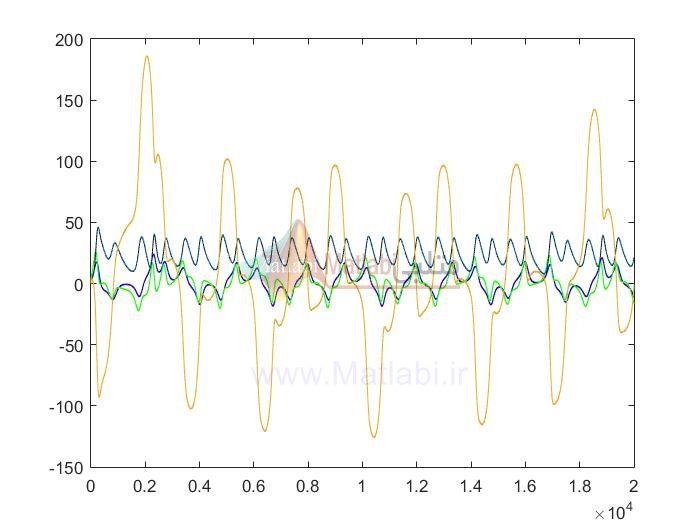
تحلیل خروجی شبیه سازی
در خروجی نهایی:
- حالات واقعی با رنگهای مختلف نمایش داده میشوند
- حالات تخمینی نیز همزمان رسم میشوند
- مشاهده میشود که پس از گذشت زمان، حالات تخمینی به حالات واقعی همگرا میشوند
این نشاندهنده:
✔ موفقیت مشاهدهگر
✔ همزمانسازی آشوب
✔ کاهش خطای تخمین
✔ پایداری تخمین در حضور نویز
میباشد.
چرا این پروژه مهم است؟
سیستمهای آشوبناک:
- بسیار حساس به شرایط اولیه هستند
- در حضور نویز رفتار پیچیدهتری دارند
- تخمین حالت در آنها دشوار است
این پروژه نشان میدهد که حتی در حضور نویز:
میتوان با طراحی مناسب بهره مشاهدهگر، همگرایی ایجاد کرد.
کاربردهای این پروژه
- تحلیل سیستمهای غیرخطی پیچیده
- آموزش همزمانسازی آشوب
- طراحی مشاهدهگر در سیستمهای آشوبناک
- پروژه کنترل غیرخطی
- پروژه درس سیستمهای دینامیکی
- پایه مناسب برای توسعه به فیلترهای پیشرفتهتر
ویژگیهای فایل دریافتی
✔ کد کامل MATLAB
✔ قابل اجرا در نسخههای جدید متلب
✔ ساختار منظم و قابل ویرایش
✔ دارای نمودار خروجی تطبیقی
✔ قابل تغییر پارامترها
مناسب چه کسانی است؟
- مهندسین کنترل
- افراد علاقهمند به سیستمهای آشوبناک
- مدرسین کنترل غیرخطی
مزیت این محصول نسبت به پروژههای مشابه
- چهارحالته بودن سیستم (پیچیدهتر از مدل سهحالته کلاسیک)
- وجود نویز اندازهگیری
- پیادهسازی مشاهدهگر عملی
- شبیهسازی طولانی (20000 نمونه)
- نمایش واضح همگرایی
سوالات متداول
آیا این پروژه شامل MPC است؟
خیر. این پروژه طراحی مشاهدهگر غیرخطی برای سیستم آشوبناک است.
آیا نویز واقعی در نظر گرفته شده؟
بله، نویز تصادفی به خروجی اضافه شده است.
آیا میتوان بهرهها را تغییر داد؟
بله، L1 تا L4 قابل تنظیم هستند.
آیا امکان توسعه وجود دارد؟
بله، میتوان آن را به فیلتر کالمن توسعه داد یا بهرهها را بهینهسازی کرد.
جمعبندی
در این پروژه:
- یک سیستم آشوبناک چهارحالته شبیه لورنز شبیهسازی شده است
- نویز تصادفی به اندازهگیری اضافه شده
- مشاهدهگر غیرخطی طراحی شده
- همگرایی حالات تخمینی بررسی شده
- نتایج عددی بهصورت نمودار ارائه شدهاند
این پروژه یک نمونه کاربردی و آموزشی از:
✔ تحلیل سیستمهای آشوبناک
✔ طراحی مشاهدهگر غیرخطی
✔ همزمانسازی آشوب
✔ تخمین حالت در حضور نویز
میباشد.
نتایج شبیه سازی با متلب:
دارای گزارش 21 صفحه ای در قالب ورد است.
این محصول شامل یک گزارش تحلیلی کامل در زمینه همزمانسازی آشوب و طراحی مشاهدهگر مقاوم، به همراه یک شبیهسازی آموزشی در MATLAB میباشد.
محتوای این محصول شامل دو بخش است:
1️⃣ گزارش تحلیلی (21 صفحه)
در این بخش:
- فرمولبندی مسئله همزمانسازی آشوب
- تحلیل مبتنی بر تابع لیاپانوف
- استخراج شرایط کافی پایداری
- بررسی ساختار طراحی مشاهدهگر
ارائه شده است.
2️⃣ شبیهسازی عددی در MATLAB
در این بخش:
- یک سیستم آشوب چهارحالته مشابه ساختار لورنز
- نویز اندازهگیری تصادفی
- طراحی مشاهدهگر غیرخطی با بهره ثابت
- بررسی همگرایی خطای تخمین
پیادهسازی شده است.
chaos, predictive control, uncertain parameters, stochastic disturbance, optimization
شبیه سازی سیستم آشوب لورنز چهارحالته و طراحی مشاهدهگر غیرخطی در حضور نویز در MATLAB
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.