توضیحات
موتور سنکرون مغناطیس دائم با کنترل کننده سرعت درجه دوم خطی
Permanent Magnet Synchronous Motor with Linear Quadratic Speed Controller
شبیه سازی موتور سنکرون مغناطیس دائم با کنترل سرعت خطی درجه دوم با متلب انجام شده است.
شبیه سازی در محیط سیمولینک و ام فایل متلب انجام شده است.
دارای گزارش 4 صفحه ای در قالب ورد است.
توضیحات شبیه سازی مقاله Permanent Magnet Synchronous Motor with Linear Quadratic Speed Controller
این مقاله یک کنترلر خطی مرتبه 2 برای کنترل سرعت موتور سنکرون مغناطیس دائم ارائه داده است.روش کنترلی LQR پیشنهاد شده دارای سرعت پاسغ گویی سریع تر و با اوورشوت کمتری نوسانات سرعت را پایدار می کند وبه تغییرات سرعت به خوبی پاسخ می دهد. جهت تایید کیفیت عملکرد این کنترلر، آن را با یک کنترلر روتین PID مقایسه کرده است.
ابتدا هر دو مدل PID و LQR در محیط mfile مدل و با یکدیگر مقایسه می شوند که خروجی ها پاسخ مناسب کنترلر LQR را به ورودی پله را به خوبی نشان می دهند.
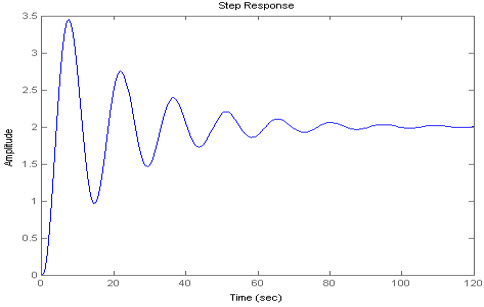
پاسخ کنترلر PID به ورودی پله
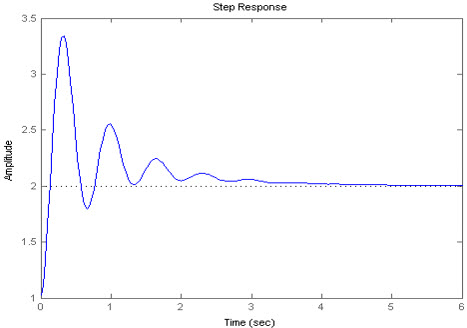
پاسخ کنترلر LQR به ورودی پله
حال این کنترلر ها را در محیط سیمولینک با اعمال یک بار پله ای به موتور سنکرون مغناطسی دائم تست می کنیم. محیط شبیه سازی و خروجی هر دو کنترلر را در شکل های زیر مشاهده می کنید.
تصویر سیمولینک در اینجا نیامده است.
دیاگرام کنترلر PID متصل به موتور سنکرون
تصویر سیمولینک در اینجا نیامده است.
دیاگرام کنترلر LQR متصل به موتور سنکرون
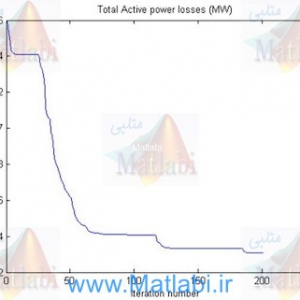
از شبیه سازی های ارائه شده خروجی هایی به صورت زیر حاصل می شود:
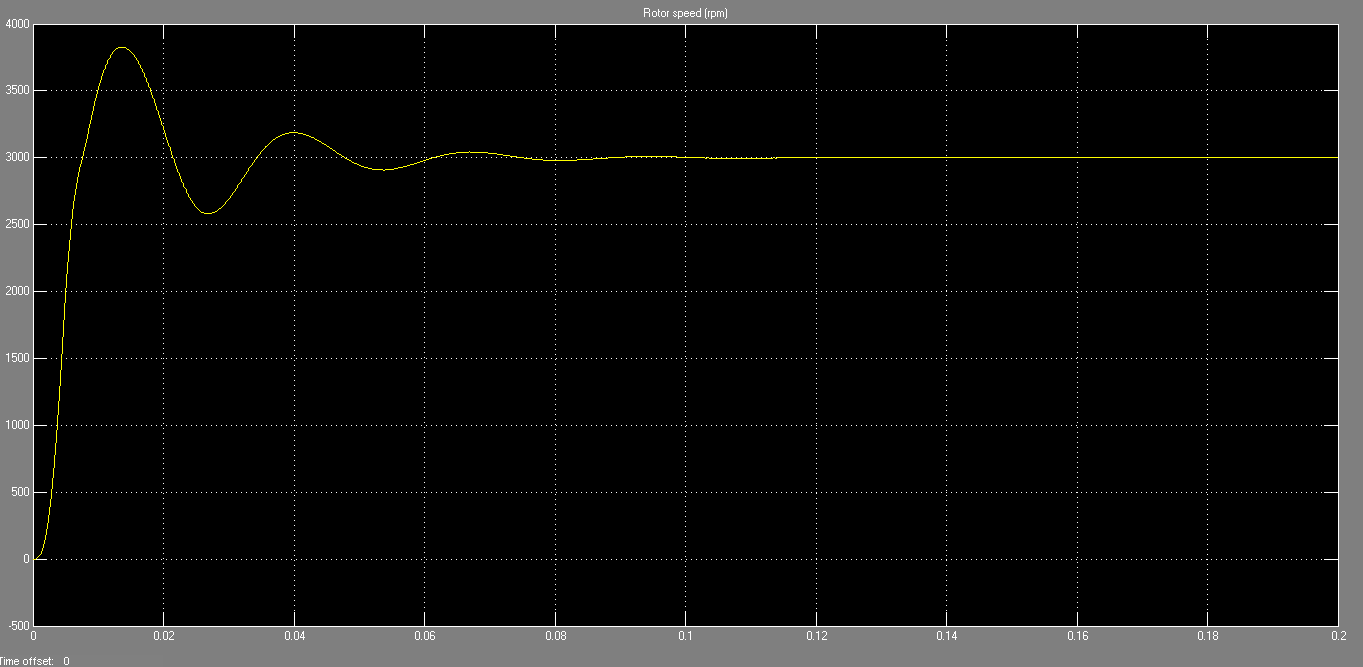
تغییرات سرعت در حضور PID کنترلر
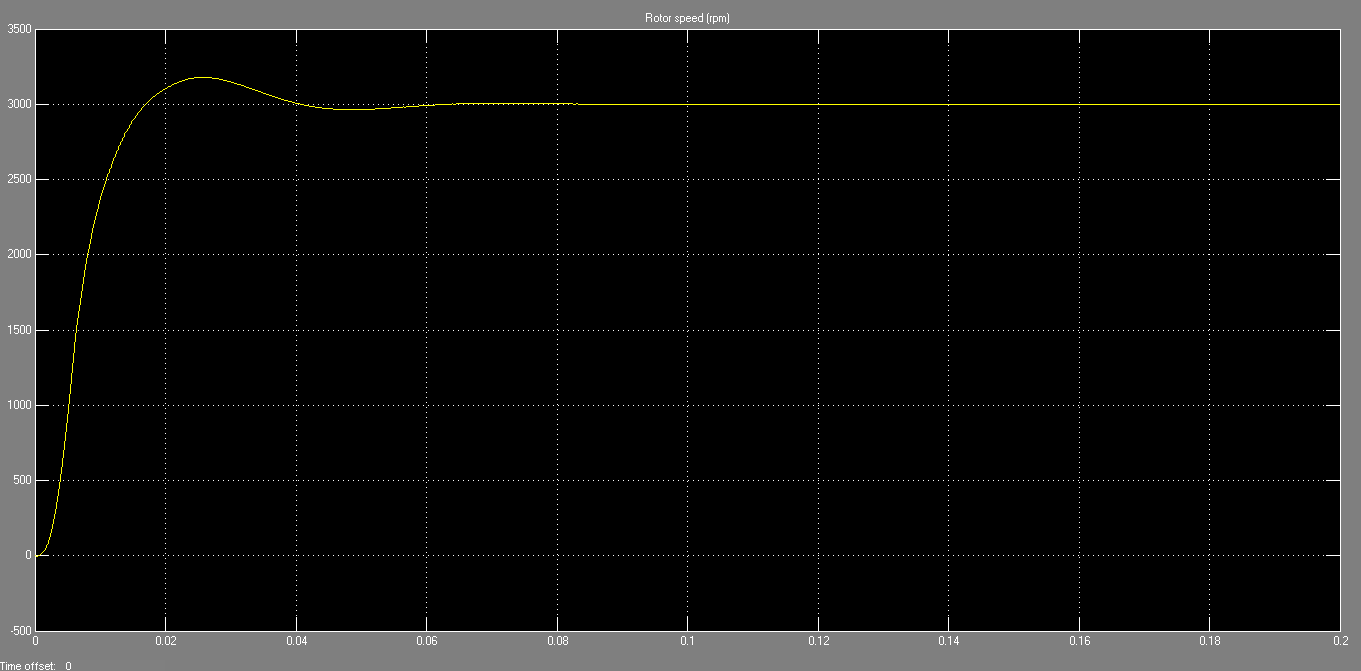
تغییرات سرعت در حضور کنترلر LQR
با توجه به نمودار های سرعت خروجی از دو کنترلر، می توان نتیجه گرفت که کنترلر LQR نسبت به تغییرات سرعت پاسخ بسیار مناسب تری را ارائه داده و مزیت استفاده از این کنترلر به خوبی نشان داده شده است.
کنترل کننده سرعت درجه دوم خطی
در این پروژه، نظریه کنترل برداری، و کاربرد آن جهت کنترل ماشین سنکرون مغناطیس دائم [PMSM] به بحث گذاشته شده است.
بخاطر نظریه کنترل برداری است که عملکرد درایو سروو PMSM، در حد عملکرد درایوهای DC قرار می گیرد، یا از آن ها فراتر می رود.
نظریه کنترل برداری، با کمک اصول تبدیل کلارک و پارک، جریان سه فاز واقعی را به جریان گشتاور و جریان میدان متناظر تبدیل می کند.
با انجام این عمل، مدل کنترل ریاضیاتی PMSM تجویززدایی می شود.
با توجه به اینکه موتور PMSM در حال جایگزین سازی موتور DC متداول برای سیستم کنترل سرعت متغیر با توان خروجی اسمی کوچک است، لذا باید عملکرد PMSM، که به پاسخ گذرای سریع نیاز دارد، تا حد امکان ارتقا پیدا بکند.
کنترل کننده PID، نقش غالب و فراگیر را در سیستم کنترل PMSM، علی الخصوص در کاربردهای واقعی بر عهده گرفته است.
این در حالیست که عملکرد PMSM مبتنی بر کنترل کننده PID، همواره در سطح رضایت بخشی قرار ندارد.
بدین ترتیب روش های جایگزینی همچون تنظیم کننده خطی – تربیعی / درجه 2 (LQR)، جهت کنترل سرعت PMSM مورد بهره برداری قرار گرفته اند. LQR یک استراتژی کنترلی بهینه است که از تابع هزینه درجه 2، جهت تعیین عملکرد کنترلی اش استفاده می کند.
به منظور اعمال LQR به سیستم کنترل سرعت PMSM، در وهله اول باید نسبت به خطی سازی مدل ریاضیاتی اصلی و غیرخطی PMSM اقدام بشود.
بدین ترتیب از روش خطی سازی استفاده می شود.
در این پروژه، مدل ریاضیاتی سیستم دینامیک PMSM تنظیم شده است.
با توجه به ماهیت غیرخطی و تزویج متقابل این سیستم، با تعریف متغیرهای جدید و اعمال رویکرد کنترل برداری، یک مدل خطی سازی شده پیشنهاد می شود.
در این روش مقدار Id روی صفر حفظ می شود. محققان استراتژی کنترلی LQR را بررسی نمودند.
عملکرد کنترلی آن با کنترل کننده متداول PID، نسبت به یک سیستم PMSM دینامیک مقایسه شده است.
این عمل به کمک محیط سیمولینک در نرم افزار متلب انجام گرفته است. نتایج شبیه سازی ها تایید کننده متدولوژی LQR پیشنهادی هستند.
ضمناً عملکرد دینامیک آن، از نظر زمان گذار، و اورشوت سرعت در حد بهتری قرار گرفته است.
همچنین متدولوژی کنترلی LQR، در مقایسه با کنترل کننده سنتی PID، عملکرد بهتری را بجا می گذارد.
کلید واژه:
Permanent Magnet Synchronous Motor (PMSM), Linear Quadratic Regulator (LQR), PID controller, Simulink
شبیه سازی مقاله
Permanent Magnet Synchronous Motor with Linear Quadratic Speed Controller
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.
متلبی راهی بسوی موفقیت