حداقل مربعات در متلب
آموزش حداقل مربعات در متلب (Least Squares & RLS) با مثالهای عملی
روش حداقل مربعات (Least Squares) یکی از مهمترین و پرکاربردترین روشها در شناسایی سیستم، تخمین پارامتر و تحلیل دادههای نویزی در مهندسی برق و کنترل است. در این آموزش، حداقل مربعات در متلب را به صورت کاملاً عملی و پروژهمحور بررسی میکنیم و پیادهسازی روشهای مختلف شامل حداقل مربعات کلاسیک، حداقل مربعات بازگشتی (RLS)، حداقل مربعات تعمیمیافته (ELS) و روش متغیرهای کمکی (IV) را با مثالهای عددی و کد آماده MATLAB توضیح میدهیم.
در این پست:
-
چند مدل واقعی سیستم شناسایی میشوند
-
تأثیر تعداد دادهها بر دقت تخمین بررسی میشود
-
همگرایی پارامترها تحلیل میشود
-
و در نهایت، روشها با یکدیگر مقایسه میشوند
تمامی مراحل همراه با کد کامنتگذاری شده متلب و نتایج شبیهسازی ارائه شده است.
صورت سوالها و مدلهای شناسایی سیستم
سوال ۱: تخمین پارامتر با روش حداقل مربعات و RLS
فرض کنید سیستم زیر داده شده است که در آن e(t)e(t) نویز سفید با واریانس 0.1 میباشد:
حداقل مربعات در متلب را با چند مثال مختلف بررسی می کنیم.
برای آموزش شبیه سازی روش های حداقل مربعات و حداقل مربعات بازگشتی و… در متلب مثال های عملی را با هم بررسی می کنیم.
فرض کنیم چنین سوالاتی مطرح است:
1-سیستم زیر را در نظر بگیرید که در آن ) e(tنویز سفید با واریانس 0/1است.
![]()
فرض کنید پارامترهای سیستم برابر باشند با:
-
a=0.7a = 0.7
-
b=2b = 2
با استفاده از روشهای زیر:
-
الف) حداقل مربعات (LS)
-
ب) حداقل مربعات بازگشتی (RLS)
پارامترهای و b را تخمین بزنید، تغییرات آنها را نسبت به تعداد تکرارها رسم کرده و نحوه همگرایی تخمینها را توضیح دهید. سپس عملکرد روشها را با یکدیگر مقایسه کنید.
سوال ۲: تخمین پارامترهای مدل چندورودی
-2فرض کنید مدل ریاضی سیستم بصورت زیر است
![]()
ورودي uبه سیستم و خروجی yبه صورت زیر است پارامترهاي a0و b0و b1را با روش حداقل مربعات تخمین بزنید.

سوال ۳: شناسایی سیستم با ورودی PRBS و مقایسه روشها
-3سیستم
![]()
با ورودي PRBSکه داراي دامنه ±1است در نظر بگیرید با فرض ) e(tنویز سفید با واریانس واحد شبیه سازي کنیددو
مدل براي سیستم زیر در نظر بگیرید
![]()
با در نظر گرفتن N=100این مدلها را با روش هاي
-
حداقل مربعات (LS)
-
حداقل مربعات تعمیمیافته (ELS)
-
روش متغیرهای کمکی (IV)
تخمین زده و با هم مقایسه کنید.
کد آماده متلب برای شبیهسازی روش حداقل مربعات
در ادامه، کد کامل متلب برای پیادهسازی تمامی سوالات بالا قرار داده شده است. این کد به صورت مرحلهبهمرحله کامنتگذاری شده و به شما کمک میکند فرآیند شناسایی سیستم و تخمین پارامترها را به صورت عملی مشاهده کنید.
🔹 نکته: کد زیر شامل پیادهسازی روشهای LS، RLS، ELS و IV بوده و اثر تعداد دادهها بر دقت تخمین را نمایش میدهد.
با پروژه آماده متلب که در زیر قرار داده شده و آموزش آن با کامنت گذاری مشخص شده است بخوبی میتوان همه مراحل را دید:
=================================
clc;پاک کردن صفحه متلب
clear all;پاک کردن متغیرهای گذشته و بلا استفاده
close all;بستن نمودارهای باز
%==========================================================================
%Q1سوال شماره 1
a=0.7;مقدار پارامتر
b=2;مقدار پارامتر
sigm_e=0.1;واریانس نویز
N=100;تعداد داده ها
N1=N;متغیر کمکی برای ذخیره تعداد داده ها
y=zeros(1,N);تعریف بردار خروجی
u=50*idinput(N);ورودی شناسایی
ep=wgn(1,N,0);نویز سفید
sigm_ep=1/(N)*sum(ep.^2);واریانس نویز
e=sqrt(sigm_e/(sigm_ep))*ep;ایجاد نویز با واریانس مورد نظر
جمع آوری داده از سیستم
for t=2:N
y(t)=-a*y(t-1)+b*u(t-1)+e(t);
end
y1=y;u1=u;
ترسیم داده های شناسایی
figure (1)
subplot(2,1,1);stairs(1:1:N,y,’b’,’linewidth’,2);grid on;axis([1 N -400 400]);ylabel(‘y’);
subplot(2,1,2);stairs(1:1:N,u,’b’,’linewidth’,2);grid on;axis([1 N -60 60]);ylabel(‘u’);xlabel(‘sample’);
%Least squaresروش حداقل مربعات
Phi=zeros(N-1,2);ماتریس داده ها
Y=zeros(N-1,1);بردار خروجی
for t=2:N
Phi(t,:)=[-y(t-1),u(t-1)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;محاسبه پارامترها
teta1=teta;
نمایش مقادیر داده در صفحه متلب
disp(‘Q1: Least squares estimation for N=100’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b=’);disp(teta(2));
N=200;تکرار شبیه سازی برای تعداد داده های بیشتر
N2=N;
y=zeros(1,N);
u=50*idinput(N);
ep=wgn(1,N,0);
sigm_ep=1/(N)*sum(ep.^2);
e=sqrt(sigm_e/(sigm_ep))*ep;
for t=2:N
y(t)=-a*y(t-1)+b*u(t-1)+e(t);
end
y2=y;u2=u;
Phi=zeros(N-1,2);
Y=zeros(N-1,1);
for t=2:N
Phi(t,:)=[-y(t-1),u(t-1)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;
teta2=teta;
disp(‘Q1: Least squares estimation for N=200’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b=’);disp(teta(2));
N=300;تکرار شبیه سازی برای تعداد داده های بیشتر
N3=N;
y=zeros(1,N);
u=50*idinput(N);
ep=wgn(1,N,0);
sigm_ep=1/(N)*sum(ep.^2);
e=sqrt(sigm_e/(sigm_ep))*ep;
for t=2:N
y(t)=-a*y(t-1)+b*u(t-1)+e(t);
end
y3=y;u3=u;
Phi=zeros(N-1,2);
Y=zeros(N-1,1);
for t=2:N
Phi(t,:)=[-y(t-1),u(t-1)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;
teta3=teta;
disp(‘Q1: Least squares estimation for N=300’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b=’);disp(teta(2));
N=400;تکرار شبیه سازی برای تعداد داده های بیشتر
N4=N;
y=zeros(1,N);
u=50*idinput(N);
ep=wgn(1,N,0);
sigm_ep=1/(N)*sum(ep.^2);
e=sqrt(sigm_e/(sigm_ep))*ep;
for t=2:N
y(t)=-a*y(t-1)+b*u(t-1)+e(t);
end
y4=y;u4=u;
Phi=zeros(N-1,2);
Y=zeros(N-1,1);
for t=2:N
Phi(t,:)=[-y(t-1),u(t-1)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;
teta4=teta;
disp(‘Q1: Least squares estimation for N=400’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b=’);disp(teta(2));
ترسیم درصد خطای نسبی تخمین پارامترها بر حسب تعداد داده ها
Nv=[100,200,300,400];
Er_Nv_a=[abs(a-teta1(1))/a,abs(a-teta2(1))/a,abs(a-teta3(1))/a,abs(a-teta4(1))/a]*100;
Er_Nv_b=[abs(b-teta1(2))/b,abs(b-teta2(2))/b,abs(b-teta3(2))/b,abs(b-teta4(2))/b]*100;
figure (2)
subplot(2,1,1);bar(Nv,Er_Nv_a,’b’);xlabel(‘N’);ylabel(‘a relative error (%)’);
subplot(2,1,2);bar(Nv,Er_Nv_b,’b’);xlabel(‘N’);ylabel(‘b relative error (%)’);
%Recursive least squaresروش حداقل مربعات بازگشتی
lmbd=0.98;ضریب فراموشی
P=1e6*eye(2); ماتریس
teta_rls1=zeros(2,N1);ماتریس تخمین ها
تخمین حداقل مربعات بازگشتی
for t=2:N1
phi=[-y1(t-1);u1(t-1)];
Kt=P*phi/(lmbd*eye(1)+phi.’*P*phi);
P=(eye(2)-Kt*phi.’)*P/lmbd;
teta_rls1(:,t)=teta_rls1(:,t-1)+Kt*(y1(t)-phi.’*teta_rls1(:,t-1));
end
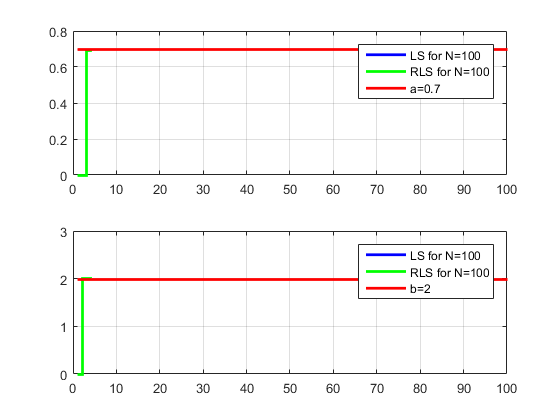
ترسیم پارامترهای تخمینی به روش حداقل مربعات و مقادیر واقعی و مقادیر روش قبل
figure (3)
subplot(2,1,1);stairs(1:N1,teta1(1)*ones(1,N1),’b’,’linewidth’,2);grid on;
hold on;
stairs(1:N1,teta_rls1(1,:),’g’,’linewidth’,2);
hold on;
stairs(1:N1,a*ones(1,N1),’r’,’linewidth’,2);
legend(‘LS for N=100′,’RLS for N=100′,’a=0.7’);
subplot(2,1,2);stairs(1:N1,teta1(2)*ones(1,N1),’b’,’linewidth’,2);grid on;
hold on;
stairs(1:N1,teta_rls1(2,:),’g’,’linewidth’,2);
hold on;
stairs(1:N1,b*ones(1,N1),’r’,’linewidth’,2);
legend(‘LS for N=100′,’RLS for N=100′,’b=2’);
%==========================================================================
%Q2سوال شماره 2
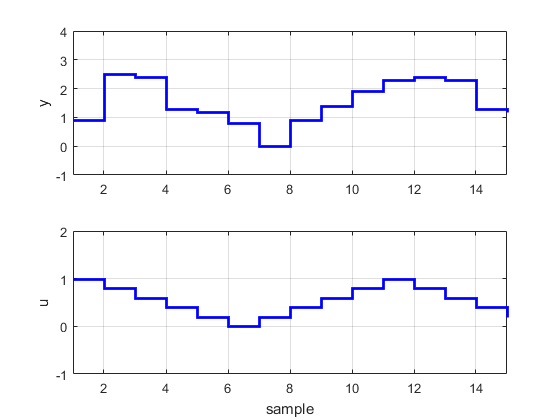
u=[1,0.8,0.6,0.4,0.2,0,0.2,0.4,0.6,0.8,1,0.8,0.6,0.4,0.2];
y=[0.9,2.5,2.4,1.3,1.2,0.8,0,0.9,1.4,1.9,2.3,2.4,2.3,1.3,1.2];
N=length(u);
ترسیم داده های شناسایی
figure (4)
subplot(2,1,1);stairs(1:1:N,y,’b’,’linewidth’,2);grid on;axis([1 N -1 4]);ylabel(‘y’);
subplot(2,1,2);stairs(1:1:N,u,’b’,’linewidth’,2);grid on;axis([1 N -1 2]);ylabel(‘u’);xlabel(‘sample’);
Phi=zeros(N-1,3);
Y=zeros(N-1,1);
for t=2:N
Phi(t,:)=[-y(t-1),u(t),u(t-1)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;تخمین پارامترها
disp(‘Q2: Least squares estimation’);
disp(‘estimated a1=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
%==========================================================================
%Q3سوال شماره 3
پارامترها
a=-0.9;
b0=1;
b1=0.5;
c=1;
sigm_e=1;
N=200;
y=zeros(1,N);
u=idinput(N);
ep=wgn(1,N,0);
sigm_ep=1/(N)*sum(ep.^2);
e=sqrt(sigm_e/(sigm_ep))*ep;
for t=3:N
y(t)=-a*y(t-1)+b0*u(t-1)+b1*u(t-2)+c*e(t);
end
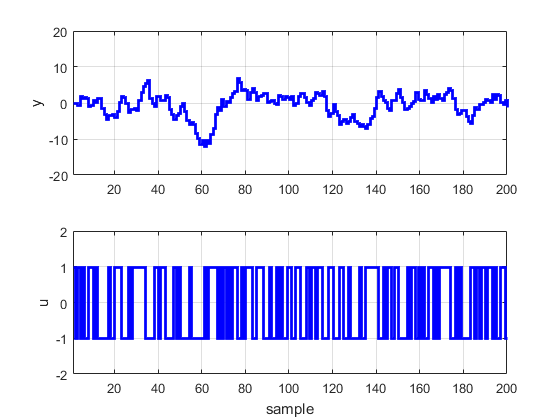
figure (5)
subplot(2,1,1);stairs(1:1:N,y,’b’,’linewidth’,2);grid on;axis([1 N -20 20]);ylabel(‘y’);
subplot(2,1,2);stairs(1:1:N,u,’b’,’linewidth’,2);grid on;axis([1 N -2 2]);ylabel(‘u’);xlabel(‘sample’);
% Model A — Least squares تخمین جداقل مربعات برای مدل اول
Phi=zeros(N-1,3);
Y=zeros(N-1,1);
for t=3:N
Phi(t,:)=[-y(t-1),u(t-1),u(t-2)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;
disp(‘Q3: Least squares estimation’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
%Model A — Extended Least squares تخمین حداقل مربعات تعمیم یافته برای مدل اول
Phi=zeros(N-1,4);
Y=zeros(N-1,1);
teta0=[teta(1);teta(2);teta(3);1];
teta=teta0;
for t=3:N
Phi(t,:)=[-y(t-1),u(t-1),u(t-2),y(t-1)-Phi(t-1,:)*teta];
Y(t)=y(t);
if (t<10)
teta=teta0;
else
teta=(Phi(1:t,:).’*Phi(1:t,:))\Phi(1:t,:).’*Y(1:t);
end
end
disp(‘Q3: Extended Least squares estimation’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
disp(‘estimated c=’);disp(teta(4));
%Model A — Instrumental variables روش متغیرهای کمکی
Phi=zeros(N-1,3);
Z=zeros(N-1,3);
Y=zeros(N-1,1);
for t=4:N
Phi(t,:)=[-y(t-1),u(t-1),u(t-2)];
Z(t,:)=[u(t-1),u(t-2),u(t-3)]; متغیرهای کمکی انتخاب شده
Y(t)=y(t);
end
teta=(Z.’*Phi)\Z.’*Y;تخمین پارامترها
disp(‘Q3: Instrumental variable estimation’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
% Model B — Least squares روش حداقل مربعات برای مدل دوم
Phi=zeros(N-1,3);
Y=zeros(N-1,1);
for t=3:N
Phi(t,:)=[-y(t-1),u(t-1),u(t-2)];
Y(t)=y(t);
end
teta=(Phi.’*Phi)\Phi.’*Y;
disp(‘Q3: Least squares estimation’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
%Model B — Extended Least squares روش حداقل مربعات تعمیم یافته برای مدل دوم
Phi=zeros(N-1,5);
Y=zeros(N-1,1);
teta0=[teta(1);teta(2);teta(3);1;1];
teta=teta0;
for t=3:N
Phi(t,:)=[-y(t-1),u(t-1),u(t-2),y(t-1)-Phi(t-1,:)*teta,y(t-2)-Phi(t-2,:)*teta];
Y(t)=y(t);
if (t<10)
teta=teta0;
else
teta=(Phi(1:t,:).’*Phi(1:t,:))\Phi(1:t,:).’*Y(1:t);
end
end
disp(‘Q3: Extended Least squares estimation’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
disp(‘estimated c0=’);disp(teta(4));
disp(‘estimated c1=’);disp(teta(5));
%Model B — Instrumental variables روش متغیرهای کمکی برای مدل دوم
Phi=zeros(N-1,5);
Z=zeros(N-1,5);
Y=zeros(N-1,1);
teta0=[teta(1);teta(2);teta(3);1;1];
teta=teta0;
for t=6:N
Phi(t,:)=[-y(t-1),u(t-1),u(t-2),y(t-1)-Phi(t-1,:)*teta,y(t-2)-Phi(t-2,:)*teta];
Z(t,:)=[u(t-1),u(t-2),u(t-3),y(t-4),y(t-5)]; متغیرهای کمکی
Y(t)=y(t);
if (t<10)
teta=teta0;
else
teta=(Z(1:t,:).’*Phi(1:t,:))\Z(1:t,:).’*Y(1:t);
end
end
disp(‘Q3: Instrumental variables estimation’);
disp(‘estimated a=’);disp(teta(1));
disp(‘estimated b0=’);disp(teta(2));
disp(‘estimated b1=’);disp(teta(3));
disp(‘estimated c0=’);disp(teta(4));
disp(‘estimated c1=’);disp(teta(5));
نگران نباشید ما این کد آماده متلب را در انتهای همین پست برای شما قرار داده ایم.
نتایج شبیهسازی حداقل مربعات در متلب
در تصاویر زیر، نتایج شبیهسازی شامل:
-
همگرایی پارامترهای تخمینی
-
مقایسه LS و RLS
-
تأثیر افزایش تعداد دادهها
-
و عملکرد روشهای تعمیمیافته
نمایش داده شده است.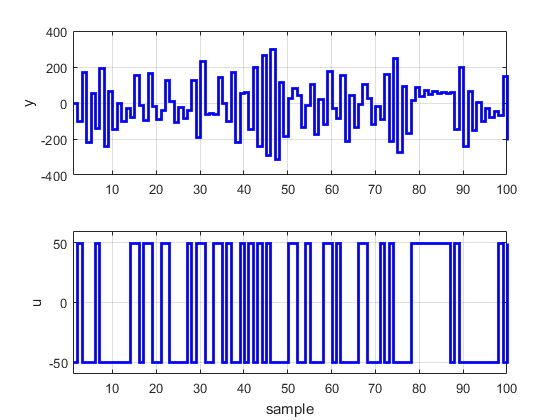

جمعبندی و نتیجهگیری
در این آموزش، روشهای مختلف حداقل مربعات در متلب برای شناسایی سیستمهای دینامیکی بررسی شد. نتایج نشان میدهد که:
-
با افزایش تعداد دادهها، دقت تخمین پارامترها افزایش مییابد
-
روش RLS برای کاربردهای آنلاین و تطبیقی مناسبتر است
-
روشهای ELS و IV در حضور نویز همبسته عملکرد بهتری دارند
این آموزش میتواند به عنوان یک مرجع کامل برای مهندسین برق، کنترل و شناسایی سیستم مورد استفاده قرار گیرد.
اگر زمان یا تجربه کافی برای پیادهسازی این روشها در متلب را ندارید،
انجام پروژه حداقل مربعات و شناسایی سیستم در متلب را به ما بسپارید.
شاید علاقه مند باشید مطالب دیگر سایت متلبی را نیز ببینید:
- پروژه کامپیوتری درس فرایند تصادفی با متلب
- طراحی و شبیه سازی درایو موتور رلوکتانس سوییچی با متلب
- شبیه سازی رفتار یک رله مغناطیسی با متلب
- سفارش شبیه سازی مقالات درس کنترل توان راکتیو
- تشخیص فونم ها(لب خوانی) با SVM در متلب
- شناسایی سیستم غیر خطی ربات بازوی مسطح دو درجه آزادی توسط شبکه عصبی
- شبیه سازی سیستم درایو کرامر استاتیکی با متلب
- حل تابع با سری تیلور و روش نیوتن در متلب
- توابع نمایی در متلب
- مشکل لایسنس متلب در زمان اجرای نرم افزار متلب
- پیش بینی سری زمانی به کمک شبکه عصبی در متلب


بی نهایت سپاس
نظر لطف شماست