توضیحات
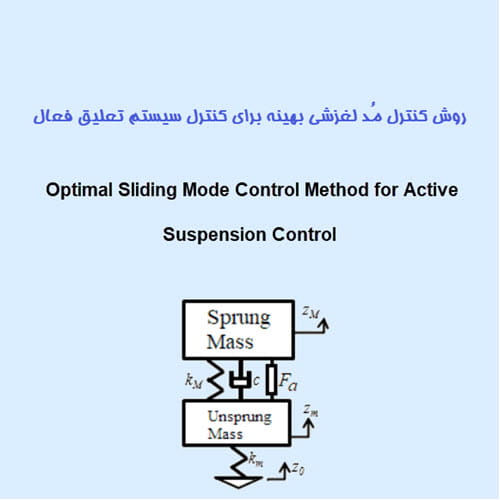
روش کنترل مُد لغزشی بهینه برای کنترل سیستم تعلیق فعال
عنوان اصلی مقاله:
Optimal Sliding Mode Control Method for Active Suspension Control
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 10 صفحه ای می باشد.
ترجمه چکیده مقاله:
در این پژوهش، از یک مدل غیرخطی یکچهارم خودرو (Quarter-Car) برای توسعه یک الگوریتم کنترل تعلیق فعال استفاده شده است. روش کنترلی بهکاررفته، کنترل مُد لغزشی بهینه (Optimal Sliding Mode Control) به همراه تکنیک خطیسازی فیدبک (Feedback Linearization) بهمنظور جبران جنبههای غیرخطی سامانه میباشد.
علاوه بر مطالعات اخیر که این روشهای کنترلی را بهکار گرفتهاند، در این تحقیق تخمین تغییرمکان استاتیکی تعلیق، یعنی جرم فنربندیشده خودرو (Sprung Mass)، نیز انجام شده است.
نتایج شبیهسازی نشان میدهد که در اختیار داشتن اطلاعات صحیح از جرم فنربندیشده خودرو — در مقایسه با در نظر گرفتن آن بهعنوان پارامتری ثابت در طراحی کنترل — عملکرد کنترلکننده را بهبود میبخشد. این موضوع منجر به کاهش سطح شتاب جرم فنربندیشده و در نتیجه افزایش راحتی سواری میشود.
توضیحات پروژه کنترل هوشمند تعلیق فعال خودرو
این پروژه شامل شبیهسازی کامل و مستند کنترل تعلیق فعال خودرو با استفاده از کنترل مد لغزشی بهینه (Optimal Sliding Mode Control) و فیلتر کالمن توسعهیافته (Extended Kalman Filter) است که دقیقاً مطابق با یک مقاله معتبر علمی پیادهسازی شده است.
تمرکز اصلی پروژه بر تخمین تغییرمکان استاتیکی تعلیق (dso) و بررسی تأثیر آن بر بهبود عملکرد کنترلکننده و افزایش راحتی سواری خودرو میباشد.
🎯 اهداف پروژه
- پیادهسازی کامل الگوریتم EKF برای تخمین پارامترهای سیستم
- شبیهسازی مدل غیرخطی Quarter-Car
- بررسی اثر جرم فنربندیشده بر عملکرد کنترل
- کاهش شتاب جرم فنربندیشده (Ride Comfort)
- انطباق نتایج با مقاله مرجع
🧠 محتوای علمی و فنی پروژه
این پروژه صرفاً یک کدنویسی ساده نیست، بلکه شامل پیادهسازی دقیق مفاهیم پیشرفته زیر است:
- مدلسازی غیرخطی سیستم تعلیق فعال
- طراحی فیلتر کالمن توسعهیافته (EKF)
- محاسبه ژاکوبینهای معادلات حالت و خروجی
- خطیسازی موضعی برای بهبود عملکرد تخمین
- تولید اغتشاشات جاده با نویز تصادفی واقعی
- تحلیل همگرایی تخمین dso
- مقایسه نتایج شبیهسازی با مقاله علمی
📁 ساختار فایلها
📂 پوشه simulation
🔹 فایل ekf.m
شامل پیادهسازی کامل الگوریتم Extended Kalman Filter:
- تعریف معادلات حالت و خروجی
- محاسبه ژاکوبینها
- بروزرسانی حالتها و ماتریس کواریانس
- انطباق کامل با معادله (9) مقاله
ورودیها:
- معادلات حالت و خروجی
- ژاکوبینها
- ماتریسهای نویز فرآیند و اندازهگیری
- تخمین اولیه حالتها و کواریانس
خروجیها:
- حالتهای تخمینزدهشده
- ماتریس کواریانس خطا
✔ تمام مراحل الگوریتم EKF بهصورت کامل و دقیق کدنویسی شدهاند.
🔹 فایل main.m
فایل اصلی اجرای شبیهسازی شامل:
- تعریف بازه زمانی شبیهسازی
- تولید پروفیل جاده تصادفی (مطابق مقاله)
- مقداردهی پارامترهای فیزیکی سیستم
- تعریف معادلات غیرخطی سیستم
- خطیسازی برای بهبود عملکرد EKF
- اجرای حلقه تخمین dso
- بررسی شرط همگرایی تخمین
- رسم نمودارهای نهایی
📌 نکته مهم:
به دلیل استفاده از نویز تصادفی (randn) در تولید پروفیل جاده، در هر اجرا شکل جاده متفاوت است؛ بنابراین نمودارها دقیقاً یکسان نیستند اما رفتار سیستم و نتایج کاملاً مطابق مقاله میباشند.
📊 نتایج شبیهسازی
نتایج بدست آمده از شبیه سازی با متلب:
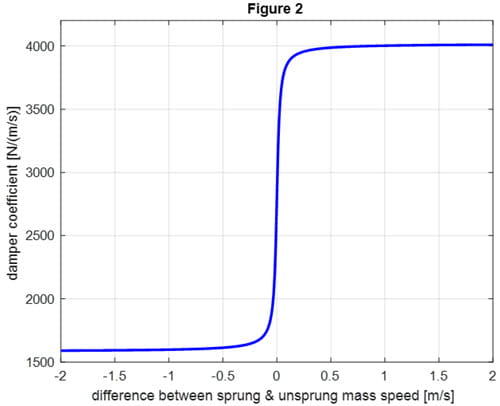
Figure 2. Typical asymmetrical damper force characteristic
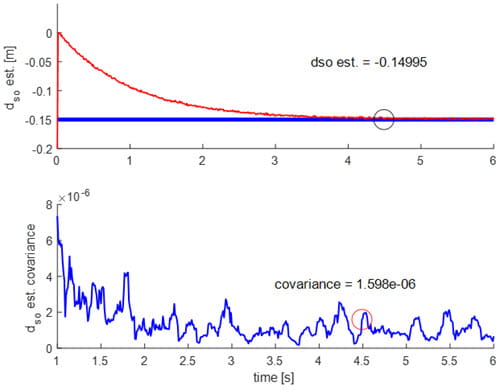
Figure 3. Simulation result for dso estimation, where the real
value is 0.15 m. The estimation, based on pre-specified
thresholds, is concluded as -0.1495 m, at around three seconds
after initialization of the algorithm
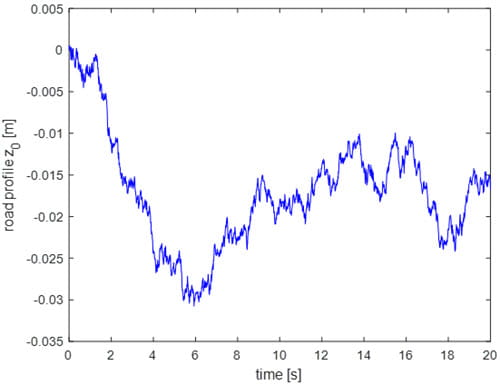
Figure 4. Road profile input z0 as a function of time
- نمودار تخمین dso کاملاً مشابه مقاله
- همگرایی سریع تخمین در چند ثانیه ابتدایی
- کاهش محسوس خطای تخمین
- نمایش نتایج برای چند اجرای مختلف جهت اثبات پایداری الگوریتم
در هر اجرا، نقطه تخمین نهایی dso با علامت مشخص شده است.
⚠️ نکته اجرایی
در موارد نادر ممکن است شرط همگرایی در اجرای خاص برقرار نشود.
در این صورت:
کافی است برنامه را مجدداً اجرا نمایید.
احتمال بروز این حالت بسیار کم است و کاملاً طبیعی میباشد.
مناسب برای چه کسانی است؟
این پروژه کاملاً مناسب است برای:
- رشتههای مهندسی:
- مکانیک (دینامیک و کنترل)
- مهندسی خودرو
- مهندسی برق – کنترل
- مباحث:
- کنترل غیرخطی
- سیستمهای تخمین
- سیستمهای تعلیق خودرو
⭐ مزایای رقابتی پروژه
✔ پیادهسازی واقعی
✔ انطباق کامل با مقاله معتبر
✔ کدنویسی تمیز و قابل فهم
✔ گزارش ورد قابل ارائه
شاید به موارد زیر نیز علاقه مند باشید:
- تشخیص خطای موتور القایی با استفاده از فیلتر کالمن توسعه یافته با متلب
- شبیهسازی کامل کنترلکننده Sliding Mode برای سیستم Ball and Beam
- کنترل عملکرد سیستم تعلیق خودروها با کنترل PID بر اساس مدل دینامیکی سه بعدی
- ساخت سیستم تعلیق فعال مدل یکچهارم خودرو با استفاده از مفهوم کنترل مد لغزشی
- کنترل پیشبین تحملکننده خطا مبتنی بر مشاهدهگر برای سیستمهای LPV با نقص سنسور: یک برنامه تعلیق فعال خودرو
شبیهسازی روش کنترل مُد لغزشی بهینه برای کنترل سیستم تعلیق فعال در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.