توضیحات
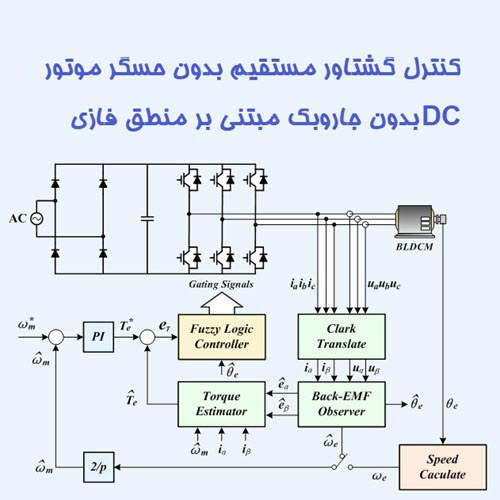
کنترل گشتاور مستقیم بدون حسگر موتور DC بدون جاروبک مبتنی بر منطق فازی
عنوان اصلی مقاله:
Sensorless Direct Torque Controlled Drive of Brushless DC Motor based on Fuzzy Logic
ترجمه تخصصی چکیده
در این پژوهش، یک روش کنترل گشتاور مستقیم (DTC) فازیِ بدون حسگر برای راهاندازی موتورهای DC بدون جاروبک (BLDC) بررسی شده است. نتایج نشان میدهد که دامنه شار پیوندی استاتور در ساختار BLDC-DTC قابل کنترل نیست، زیرا این مقدار بهطور خودکار توسط کموتاسیون هر ۶۰ درجه الکتریکی تعیین میشود. ازاینرو، کنترل شار پیوندی در روش پیشنهادی بهکار گرفته نشده است.
بهمنظور بهبود عملکرد استاتیکی و دینامیکی سیستم، منطق فازی در ساختار کنترل وارد شده است. در این روش، خطای گشتاور و زاویه شار پیوندی موتور BLDC به چندین مجموعه فازی تفکیک میشوند تا بردار مناسب ولتاژ فضای استاتور با دقت انتخاب شود. این کار موجب کاهش ریپل گشتاور و افزایش سرعت پاسخ گشتاوری میگردد.
یک مشاهدهگر حالت برای تخمین EMF معکوس طراحی شده است و از EMF تخمینی میتوان گشتاور الکترومغناطیسی و سرعت روتور را استخراج کرد. نتایج شبیهسازی نشاندهنده عملکرد مطلوب و کارایی طرح کنترلی پیشنهادی هستند.
توضیحات پروژه
این محصول شامل شبیهسازی کامل و قابل اجرای مقاله “کنترل گشتاور مستقیم بدون حسگر موتور BLDC مبتنی بر منطق فازی” است که با نرمافزار MATLAB/Simulink پیادهسازی شده و تمامی بخشهایی که در مقاله اصلی فاقد توضیح، ناقص یا دارای خطا بودهاند، در این پروژه بازسازی، اصلاح و تکمیل شدهاند.
ویژگیهای شاخص این شبیهسازی
- پیادهسازی کامل سیستم DTC بدون حسگر برای موتور BLDC
- طراحی دقیق کنترلر فازی (FIS) مطابق مقاله
- رفع ایراد بزرگ تابع عضویت مقاله (وجود 7 تابع بهجای 6 تابع)
- ساخت بلوکهای محاسباتی شامل تبدیل Clarke، تبدیل dq و معادلات دینامیکی
- طراحی مشاهدهگر حالت برای تخمین EMF، گشتاور و سرعت
- فراهم بودن فایل سیمولینک + فایل main (اجرای درست فقط از طریق main)
- نزدیکسازی نتایج به مقاله علیرغم اشتباهات و نواقص موجود در متن اصلی
- امکان تغییر زمان شبیهسازی برای مشاهده رفتار کامل شار پیوندی
توضیحات دقیق محتوای محصول
1. ساختار کامل مدل سیمولینک
مدل سیمولینک بهصورت حرفهای در چند بخش اصلی سازماندهی شده است:
- مدل قدرت و منبع ولتاژ مطابق ساختار مقاله (با توجه به نامشخص بودن پارامترها، از مقادیر پیشفرض علمی استاندارد استفاده شده است).
- مدل موتور BLDC با پارامترهایی که مقاله ذکر کرده است.
- کنترلر فازی (FLC) شامل دو ورودی اصلی مقاله (خطای گشتاور و زاویه شار) همراه با بلوکهای اشباع برای حفظ حدود مجاز.
- پیادهسازی 6 حالت ولتاژ فضایی دقیقاً مطابق ساختار DTC از طریق یک بلوک MATLAB Function.
- سیستم تبدیل Clarke و dq برای استخراج مؤلفههای مناسب تحلیل و کنترل.
2. سیستم فازی
- فایل bldcfuzzy.fis کاملاً مطابق مقاله ساخته شده است.
- تابع عضویت اشتباه مقاله (وجود 7 تابع بهجای 6 تابع) اصلاح شده و تابع اضافی s4 حذف شده است.
- قوانین فازی و خروجیها مطابق ساختار مقاله بازطراحی شدهاند.
3. مشاهدهگر حالت و معادلات مقاله
- معادلات 15، 16، 21 و 23 بهطور کامل و دقیق پیادهسازی شدهاند.
- بهدلیل نبود ضرایب K و Ke در مقاله، مقادیر مناسب و منطقی انتخاب شدهاند تا رفتار واقعی سیستم به بهترین شکل بازتولید شود.
- نکته مهم: مقاله یک ایراد ساختاری دارد که باعث میشود e-alpha و e-beta در معادلات به مقدار ثابت تبدیل شوند؛ در این پروژه این موضوع بازسازی و اثر آن تحلیل شده است.
4. بازتولید نتایج مقاله
با وجود نواقص و اشتباهات مقاله، نتایج شبیهسازی تا حد زیادی با نمودارهای مقاله منطبق شدهاند:
- نمودار فلوی استاتور (شکل دایرهای) رفتار نزدیک به مقاله دارد.
- گشتاور الکترومغناطیسی، ولتاژها و جریانها در محدوده علمی درست و مشابه مقالهاند.
- سرعت زاویهای و زاویه تتا کاملاً به مقدار مطلوب میرسند و نتایج تخمینی، نمودار واقعی را دنبال میکنند.
- نمودار e‑beta مانند مقاله بازتولید شده است.
- در برخی نمودارها، بهدلیل اشکالات مقاله، از ضرایب مقیاسسازی منطقی استفاده شده تا رفتار علمی قابل مقایسه شود.
5. نکات اجرایی
- شبیهسازی باید از طریق فایل main اجرا شود؛ اجرای مستقیم مدل سیمولینک توصیه نمیشود.
- امکان افزایش زمان شبیهسازی برای رسیدن به نمودارهای توپرتر (شار پیوندی) وجود دارد.
نتایج بدست آمده از شبیه سازی با متلب
نکته بسیار مهم: به دلیل توضیحات ناکافی مقاله و اشتباهات آن نمیتوان به نتایج 100 در 100 منطبق رسید ولی خواهیم دید که نتایج نزدیک هستند. به علاوه در بعضی نمودارها ناچار به استفاده از ضرایبی برای یکسان کردن مقیاس نمودارهای مقاله و شبیه سازی بودیم که دلیل آن هم اشکال های مقاله بود.
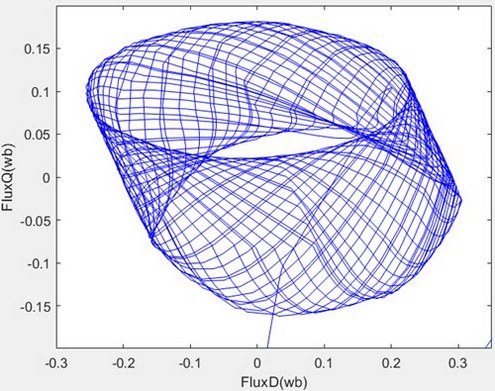
Fig. 5. The stator flux linkage trajectory
نمودار flux: بازه تغییرات مشابه مقاله است و شکل دایره هم تا حدودی به دست آمده. اگر زمان بیشتر در نظر گرفته شود، این نمودارها تو پر تر خواهند شد. زمان را میتوانید در خطوط 8 و 55 فایل main تغییر دهید (به جای عدد 0.6 sec).
بازه تغییرات ولتاژ و جریان و گشتاور هم در حدود مقاله می باشد:
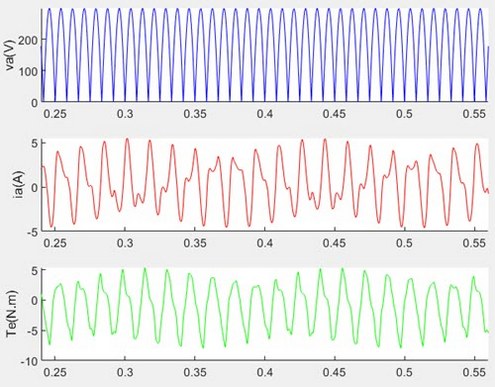
Fig. 6. Comparisons of the conventional and proposed DTC scheme(phase
voltage, stator phase current and torque) (a) PWM scheme
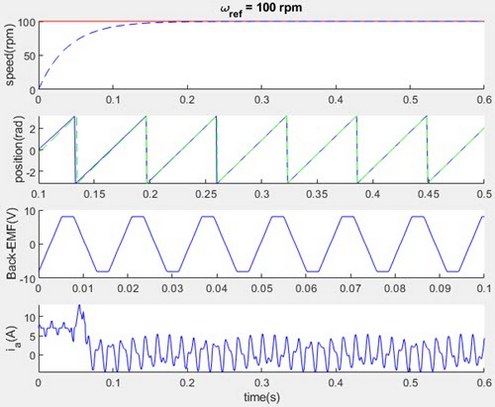
Fig. 7. Simulation results of the proposed DTC scheme at 100 rpm
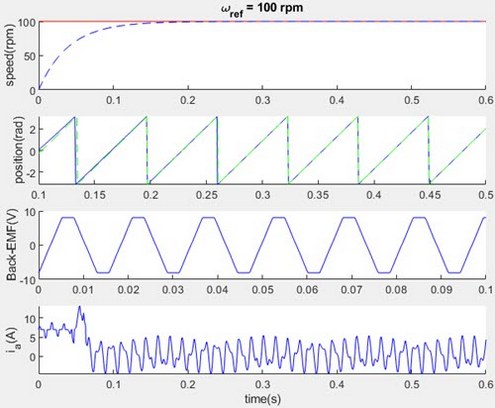
Fig. 7. Simulation results of the proposed DTC scheme at 1000 rpm
ملاحظه می شود که سرعت زاویه به خوبی در دو شکل بعدی به مقدار مطلوب رسیده. همچنین زاویه تتا در هر دو شکل مشابه مقاله است و نمودارهای تخمین زده هم نمودارهای واقعی را تعقیب کرده اند. نمودار e-beta نیز شبیه مقاله شده است و در نهایت بازه تغییرات جریان ها. اگر نیاز به انجام پروژه کنترل فازی دارین متلبی دارای مجریان فرهیخته و متعهد و مجرب در این زمینه است.
چرا این شبیهسازی ارزش خرید دارد؟
- مقاله اصلی چندین اشتباه مهم و قسمتهای ناقص دارد؛ این پروژه آنها را ترمیم، اصلاح و مدلسازی کرده است.
- نتایج بسیار نزدیک به مقاله تولید شدهاند، اما رفتار واقعی سیستم نیز حفظ شده است.
- برای دانشجویان و پژوهشگران یک مرجع کاملاً کاربردی و آماده ارائه محسوب میشود.
- کدها تمیز، خوانا و منطبق بر استانداردهای شبیهسازی موتورهای الکتریکی هستند.
شاید به موارد زیر نیز علاقه مند باشید:
- یک روش ساده برای مدلسازی ماشین DC آهنربای دائم بدون جاروبک در محیط متلب
- طراحی و تجزیه و تحلیل کنترل کننده منطق فازي براي کنترل فرکانس بار در سیستم هاي قدرت
- بررسی تطبیقی کنترل سرعت موتور DC با استفاده از کنترلر PI، IP، و منطق فازی
- یک کنترلر PID فازی خود تنظیم کننده آنتی وایندآپ برای کنترل سرعت موتور DC بدون جاروبک
شبیهسازی کنترل گشتاور مستقیم بدون حسگر موتور DC بدون جاروبک مبتنی بر منطق فازی در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.