توضیحات
کنترل مبتنی بر رویداد و دادهمحور برای سیستمهای غیرخطی تحت حملات محرومازخدمت با قیود فرکانس و مدت زمان
عنوان اصلی:
Event-Triggered Data-Driven Control for Nonlinear Systems Under Frequency-Duration-Constrained DoS Attacks
شبیه سازی در محیط امفایل متلب انجام شده است.
دارای گزارش ورد 10 صفحه ای می باشد.
ترجمه چکیده مقاله:
این مقاله به مسئله کنترل تطبیقی بدون مدل (MFAC) مبتنی بر رویداد برای سیستمهای غیرخطی ناشناخته تحت حملات محرومازخدمت (DoS) میپردازد، جایی که طراحی و تحلیل تحت چارچوب دادهمحور مورد بحث قرار میگیرند.
ابتدا، با استفاده از مشتق جزئی شبه جدید، سیستمهای غیرخطی به یک مدل رابطه دادهای معادل تبدیل میشوند.
سپس، حملات DoS به صورت محدود شده توسط فرکانس و مدت زمان آنها توصیف میشوند، و بدون هیچ فرض خاصتری درباره ساختار یا استراتژی حمله.
در ادامه، یک طرح کنترلی MFAC مبتنی بر رویداد جدید پیشنهاد میشود.
با استفاده از نظریه پایداری لیاپانوف، عملکرد پایداری تحلیل میشود.
علاوه بر این، یک الگوریتم جبرانی برای مقابله با اثرات نامطلوب ناشی از حملات DoS طراحی میشود.
در نهایت، شبیهسازیهایی شامل یک مثال عددی و یک مثال کنترل فرکانس بار (LFC) برای سیستمهای قدرت چندناحیهای ارائه میشوند تا اعتبار و قابلیت کاربرد روشهای پیشنهادی نشان داده شود.
توضیحات پروژه شبیهسازی متلب مقاله کنترل DoS با رویکرد داده-محور
مجموعه کامل فایلهای شبیهسازی متلب (MATLAB) برای مقاله معتبر:
“Event-Triggered Data-Driven Control for Nonlinear Systems Under Frequency-Duration-Constrained DoS Attacks”
منتشر شده در IEEE Transactions on Information Forensics and Security, Vol. 18, 2023
این محصول شامل دو m-فایل اصلی است که تمامی نتایج مقاله (شکلهای 4 تا 14) را بازتولید میکنند. کدها به صورت خط به خط بر اساس معادلات مقاله (معادلات 6، 7، 8، 9، 21، 22) پیادهسازی شدهاند.
محتویات محصول
| نام فایل | توضیحات |
|---|---|
fig_4_8.m | شبیهسازی مثال عددی اول (شکلهای 4 تا 8 مقاله) |
fig_10_14.m | شبیهسازی سیستم قدرت چندناحیهای (شکلهای 10 تا 14 مقاله) |
dos1.mat | زمانبندی حملات DoS برای مثال اول |
dos2.mat | زمانبندی حملات DoS برای مثال دوم |
ویژگیهای فنی کدها
فایل fig_4_8.m (مثال عددی غیرخطی)
- سیستم هدف: سیستم غیرخطی SISO با دینامیک متغیر با زمان (معادله 26 مقاله)
- سیگنال مرجع: ترکیبی از سیگنال پلهای و سینوسی (معادله 27 مقاله)
- پیادهسازی کامل الگوریتمها:
- معادله 7: تخمین پارامتر PPD با الگوریتم ریست
- معادله 8: الگوریتم ریست برای تخمینگر
- معادله 9: قانون کنترل MFAC مبتنی بر رویداد
- معادله 21 و 22: الگوریتم جبرانساز (Compensation)
- حملات DoS: پیادهسازی بر اساس قیود فرکانس و مدت زمان (Assumptions 3 و 4)
- مکانیزم رویداد-مبنا: پیادهسازی شرط تریگر معادله 6 با پارامتر γ قابل تنظیم
قابلیتهای خاص این فایل:
- پشتیبانی از مقادیر مختلف γ (پارامتر تریگر) و رسم شکل 7 مقاله
- امکان مقایسه با و بدون جبرانساز (شکل 8 مقاله)
- رسم لحظات و فواصل تریگر (شکلهای 6 و 12-13)
- امکان غیرفعال کردن حملات DoS برای مقایسه (حلقه for با دو تکرار)
فایل fig_10_14.m (سیستم قدرت چندناحیهای – LFC)
- سیستم هدف: کنترل فرکانس بار (Load Frequency Control) برای سیستم قدرت سه ناحیهای
- ماتریسهای فضای حالت: برگرفته از مرجع [44] مقاله (Su et al. 2017)
- پارامترها: زمان نمونهبرداری T = 0.005 ثانیه، زمان شبیهسازی 60 ثانیه
- خروجیهای قابل رسم:
- پاسخ فرکانس (Δf) برای هر ناحیه
- انحراف توان خطوط انتقال (ΔP_lie)
- لحظات تریگر برای نواحی مختلف
- مقایسه عملکرد با و بدون جبرانساز
نتایج قابل تولید توسط کدها
| شکل مقاله | محتوا | وضعیت تولید |
|---|---|---|
| شکل 4 | خروجی سیستم و سیگنال مرجع | ✅ |
| شکل 5 | خطای تعقیب (Tracking Error) | ✅ |
| شکل 6 | لحظات و فواصل تریگر | ✅ |
| شکل 7 | خطا برای مقادیر مختلف γ | ✅ |
| شکل 8 | مقایسه با و بدون جبرانساز | ✅ |
| شکل 10 | پاسخ فرکانس (Δf) | ✅ |
| شکل 11 | انحراف توان خطوط (ΔP_lie) | ✅ |
| شکل 12 | لحظات تریگر ناحیه 1 | ✅ |
| شکل 13 | لحظات تریگر ناحیه 2 | ✅ |
| شکل 14 | مقایسه جبرانساز برای Δf | ✅ |
نکات مهم و واقعی درباره شبیهسازی
✅ تطابق با مقاله: کدها دقیقاً بر اساس معادلات مقاله نوشته شدهاند.
⚠️ مدیریت حملات DoS: به دلیل مشخص نبودن مقدار دقیق پارامتر γ در برخی شکلهای مقاله، زمانبندی حملات در فایلهای
dos1.matوdos2.matبه صورت جداگانه تعریف شده تا نتایج به مقاله اصلی نزدیکتر باشد. در خطوط 187 تا 189 فایلfig_4_8.m، برای مقادیر مشخص γ، زمان حملات مستقیماً از معادله 6 مقاله محاسبه میشود.
⚠️ شکل ظاهری نتایج سیستم قدرت: در شبیهسازی دوم (شکلهای 10 تا 14)، ظاهر نمودارها ممکن است با مقاله اصلی تفاوت جزئی داشته باشد. دلیل این موضوع: مقاله توضیحات کامل و دقیقی از دینامیک سیستم و برخی پارامترها ارائه نداده است. با این حال، رفتار کیفی و تحلیل نتایج (همگرایی، کاهش خطا، بهبود با جبرانساز) کاملاً مشابه مقاله است.
تنظیمات پارامترهای پیشفرض
مثال اول (fig_4_8.m)
η = 1, μ = 1, ρ = 0.6, λ = 0.1, ε = 10^{-5}, φ̂(1) = 0.5
γ = 0.7 (قابل تغییر برای شکل 7)مثال دوم (fig_10_14.m)
η = 0.4, μ = 1.4, ρ = 2.7, λ = 2.5, γ = 0.7 φ̂(1:3,1:2) = 0.1
نتایج شبیه سازی و تحلیل نتایج
مثال اول:
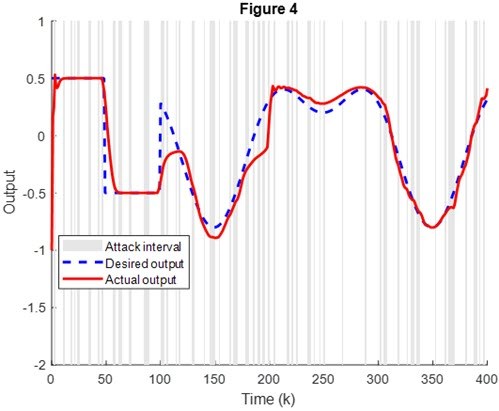
Fig. 4. System output under DoS attacks
- شکل 4: خروجی واقعی سیگنال مرجع را به طور مناسب تعقیب میکند
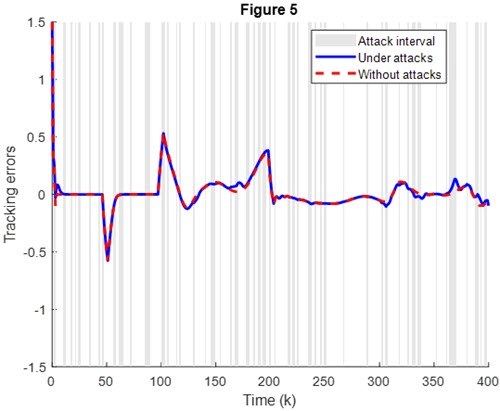
Fig. 5. Comparison of tracking errors with and without DoS attacks
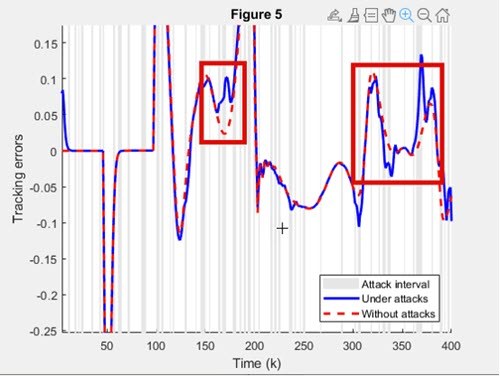
Fig. 5. Comparison of tracking errors with and without DoS attacks
- شکل 5: خطای تعقیب در حالت بدون حمله بهتر (کوچکتر) از حالت با حمله است
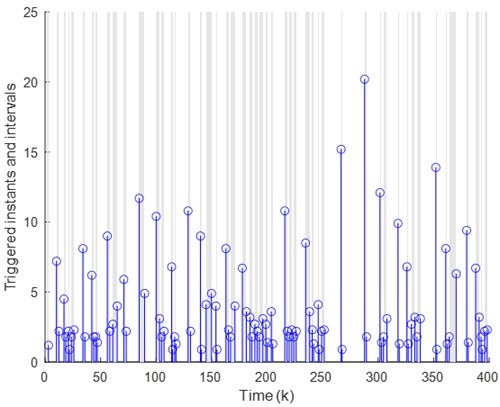
Fig. 6. Triggering instants and intervals
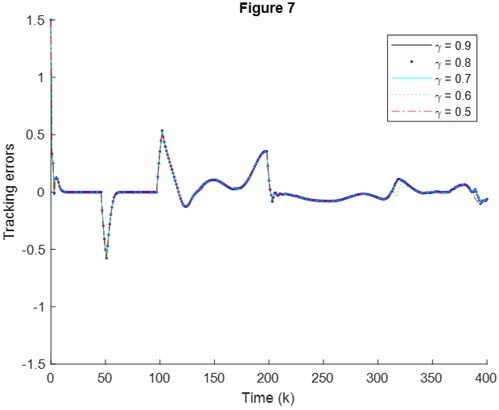
Fig. 7. Tracking errors under the different triggering parameters
- شکل 7: با بزرگنمایی تصویر، تفاوت عملکرد برای مقادیر مختلف γ قابل مشاهده است
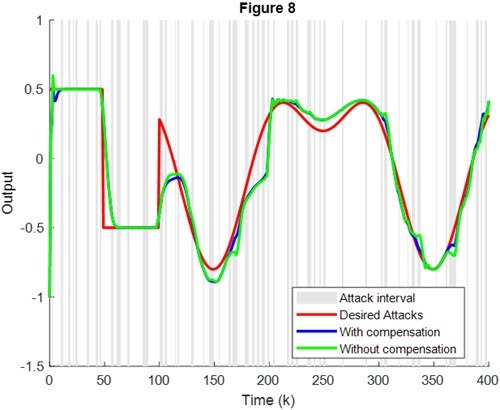
Fig. 8. Comparison of tracking errors between two control schemes
- شکل 8: حالت با جبرانساز نتایج بهتری نسبت به حالت بدون جبرانساز دارد
مثال دوم (سیستم قدرت):
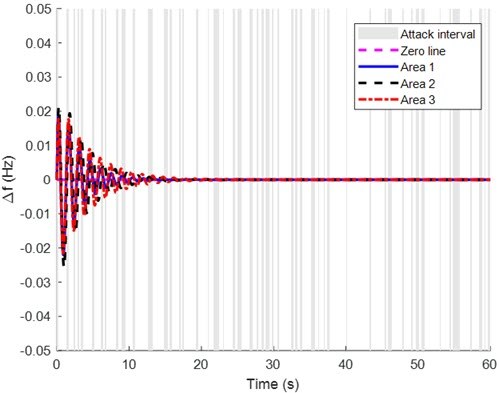
Fig. 10. Frequency response 1f of power system
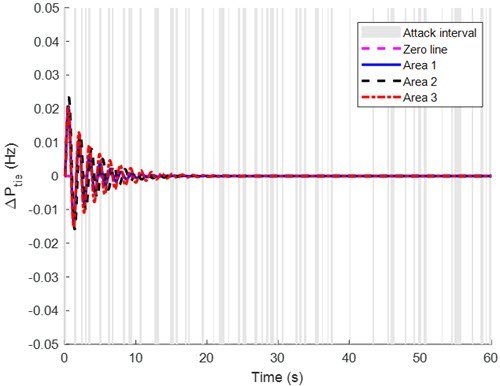
Fig. 11. Tie line power deviation response 1Ptie of power system
- شکلهای 10-11: فرکانس و توان خطوط به سمت صفر همگرا میشوند
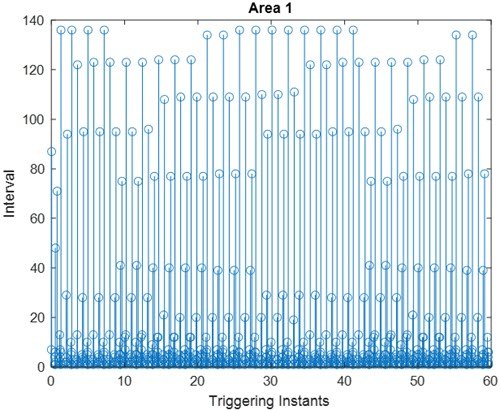
Fig. 12. Triggering instants and the interval for area 1
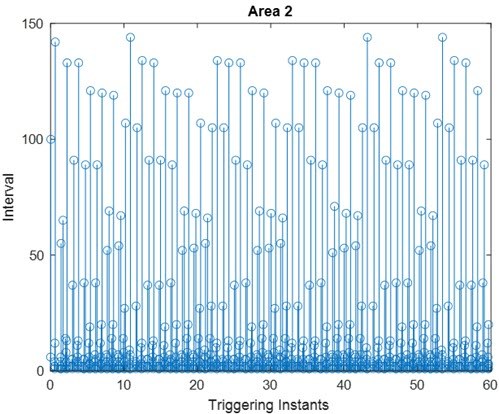
Fig. 13. Triggering instants and the interval for area 2
- شکلهای 12-13: فواصل تریگر نشاندهنده صرفهجویی در پهنای باند است
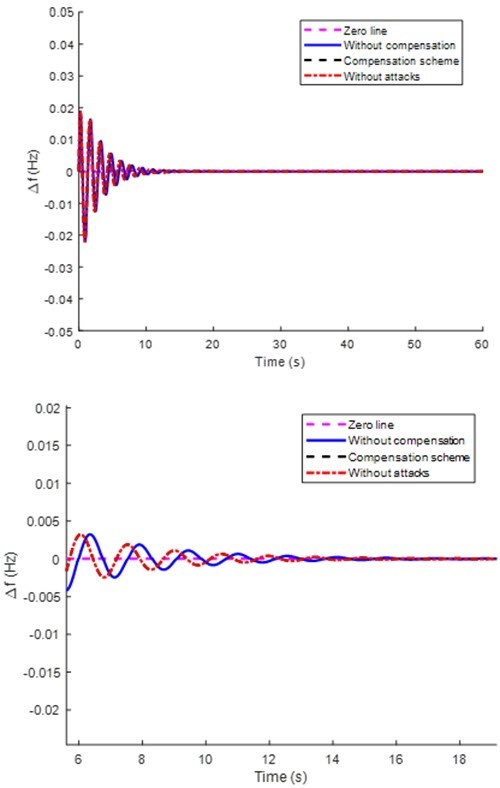
Fig. 14. Comparison of 1f under different control schemes
- شکل 14: با بزرگنمایی مشخص میشود که در حالت جبرانساز، همگرایی زودتر اتفاق افتاده است
پیشنیازهای اجرا
- نرمافزار: MATLAB (نسخه 2018 یا جدیدتر)
- نیاز به Toolbox خاصی نیست (همه کدها با توابع پایه متلب نوشته شدهاند)
سوالات متداول
سوال: آیا کدها به صورت آماده اجرا هستند؟
پاسخ: بله. پس از دانلود، با اجرای هر یک از فایلهای m.، تمامی شکلهای مربوطه به صورت خودکار رسم میشوند.
سوال: آیا میتوانم پارامترها را تغییر دهم؟
پاسخ: بله. تمامی پارامترها (η, μ, ρ, λ, γ و غیره) در ابتدای کدها تعریف شدهاند و قابل تغییر هستند.
سوال: آیا پشتیبانی فنی ارائه میشود؟
پاسخ: بله. در صورت بروز خطا یا سوال در مورد اجرا، پاسخگو خواهیم بود.
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل رویداد مبتنی بر مشاهده گر برای سیستمهای چند عاملی خطی تحت یک نمودار هدایتشده و حملات DoS
- کنترل پیشبین مدل مبتنی بر رویداد مقاوم برای سیستمهای فیزیکی سایبری تحت حملهٔ Dos
- کنترل ردیابی و نمونه گیری بهینه نزدیک مبتنی بر رویداد از سیستم های غیرخطی
- کنترل سنکرون سازی امن مبتنی بر مشاهدهگر و رویدادمحور برای سامانههای چندعامله تحت حملات تزریق داده جعلی
- کنترل بازخورد خروجی رویداد-مبتنی پویا برای سیستمهای شبکهای تحت چندین حمله سایبری
شبیهسازی کنترل مبتنی بر رویداد و دادهمحور برای سیستمهای غیرخطی تحت حملات محرومازخدمت با قیود فرکانس و مدت زمان در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.