توضیحات
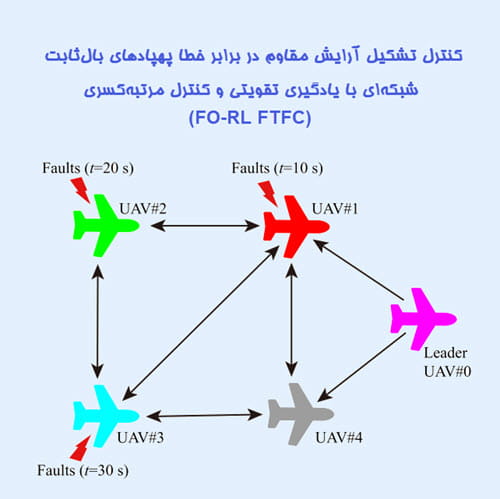
کنترل تشکیل آرایش مقاوم در برابر خطا پهپادهای بالثابت شبکهای با یادگیری تقویتی و کنترل مرتبهکسری (FO-RL FTFC)
عنوان اصلی مقاله:
Reinforcement Learning-Based Fractional-Order Adaptive Fault-Tolerant Formation Control of Networked Fixed-Wing UAVs With Prescribed Performance
شبیه سازی در محیط سیمولینک متلب 2020a انجام شده است.
دارای گزارش مختصر ورد هست. توضیحات و نتایج 11 صفحه می باشد.
ترجمه چکیده مقاله
این مقاله به بررسی مسئله کنترل تشکیل آرایش مقاوم در برابر خطا (FTFC) برای پهپادهای بالثابت شبکهای در مواجهه با خطاها میپردازد.
بهمنظور مقیدسازی خطاهای رهگیری توزیعشده پهپادهای پیرو نسبت به پهپادهای مجاور در حضور خطا، توابع عملکرد از پیش تعیینشده با همگرایی در زمان محدود (Finite-Time Prescribed Performance Functions – PPFs) توسعه داده شدهاند تا خطاهای رهگیری توزیعشده را، با درنظرگرفتن الزامات گذرای و حالت ماندگار تعیینشده توسط کاربر، به مجموعه جدیدی از خطاها تبدیل کنند.
سپس، شبکههای عصبی منتقد (Critic NNs) برای یادگیری شاخصهای عملکرد بلندمدت توسعه داده شدهاند که بهمنظور ارزیابی عملکرد رهگیری توزیعشده مورد استفاده قرار میگیرند. بر اساس شبکههای منتقد تولیدشده، شبکههای عصبی بازیگر (Actor NNs) طراحی شدهاند تا ترمهای غیرخطی نامعلوم را یاد بگیرند.
علاوهبراین، بهمنظور جبران خطاهای یادگیری در شبکههای عصبی بازیگر–منتقد مبتنی بر یادگیری تقویتی، ناظران اغتشاش غیرخطی (Nonlinear Disturbance Observers – DOs) همراه با خطاهای یادگیری کمکی بهصورت هوشمندانه طراحیشده توسعه داده شدهاند تا طراحی FTFC را تسهیل کنند.
همچنین، با استفاده از تحلیل پایداری لیاپانوف نشان داده میشود که تمامی پهپادهای پیرو قادر خواهند بود پهپاد رهبر را با افستهای از پیش طراحیشده دنبال کنند و خطاهای رهگیری توزیعشده در زمان محدود همگرا میشوند.
در نهایت، نتایج شبیهسازی مقایسهای ارائه شدهاند تا کارایی طرح کنترلی پیشنهادی را نشان دهند.
توضیحات پروژه کنترل آرایش مقاوم در برابر خطا پهپادهای بالثابت با یادگیری تقویتی
این محصول شامل شبیهسازی کامل مقاله منتشرشده در ژورنال معتبر IEEE Transactions on Neural Networks and Learning Systems در حوزه کنترل پیشرفته پهپادهای چندعاملی است.
در این پروژه، مسئله کنترل تشکیل آرایش (Formation Control) برای چند UAV بالثابت شبکهای در حضور:
- خرابی عملگر (Actuator Fault)
- اغتشاش خارجی
- نامعینی دینامیکی
با استفاده از ترکیب پیشرفتهای از روشهای زیر پیادهسازی شده است:
- یادگیری تقویتی Actor–Critic
- کنترل تطبیقی مقاوم
- کنترل مرتبهکسری (Fractional-Order Control)
- عملکرد از پیش تعیینشده (Prescribed Performance)
ویژگیهای فنی پروژه
✅ پیادهسازی کامل ساختار کنترلی مقاله
✅ استفاده از جعبهابزار FOMCON Toolbox برای مشتق و انتگرال مرتبهکسری
✅ طراحی مدل در Simulink
✅ اجرا با MATLAB 2020a (سازگار با نسخههای نزدیک)
✅ بازتولید اکثر شکلهای مقاله
✅ مستندسازی خطبهخط معادلات داخل مدل
ساختار فایلها
پوشه پروژه شامل:
- فایل
main.mبرای اجرای شبیهسازی - مدل کامل Simulink
- پوشههای جداگانه برای تولید هر شکل مقاله
- پوشه
fomconشامل ابزار محاسبات مرتبهکسری - گزارش در قالب Word
- ویدئوی راهنمای نصب fomcon
تمام پوشههای مربوط به شکلها ساختار یکسان دارند و تنها تفاوت آنها در پارامترهای دو سناریوی مقاله است.
آنچه در این شبیهسازی پیادهسازی شده است
1️⃣ کنترل مرتبهکسری
- پیادهسازی مشتق کسری
- پیادهسازی انتگرال کسری
- تنظیم پارامترهای FO مطابق مقاله
2️⃣ یادگیری تقویتی Actor–Critic
- پیادهسازی شبکههای RBF
- ساختار منتقد و بازیگر
- بهروزرسانی وزنها طبق روابط مقاله
3️⃣ کنترل مقاوم در برابر خطا
- مدلسازی خرابی عملگر
- جبران اغتشاش
- تضمین همگرایی خطا
4️⃣ تضمین عملکرد از پیش تعیینشده
- محدودسازی خطا در بازه مجاز
- همگرایی سریع به صفر
- تحلیل رفتار گذرا
نتایج شبیهسازی
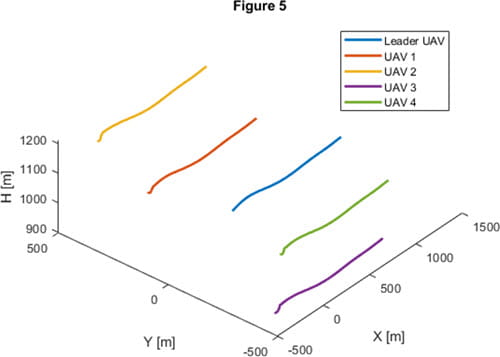
Fig. 5. Flight trajectories of all fixed-wing UAVs
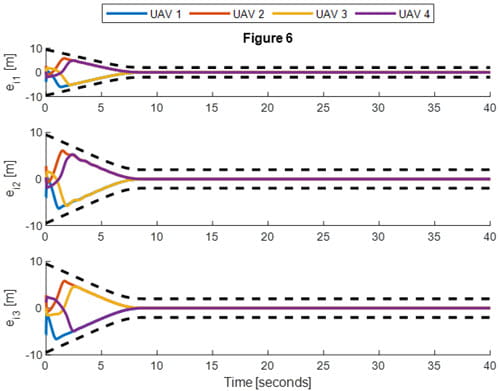
Fig. 6. Distributed tracking errors ei j , i = 1–4 and j = 1–3
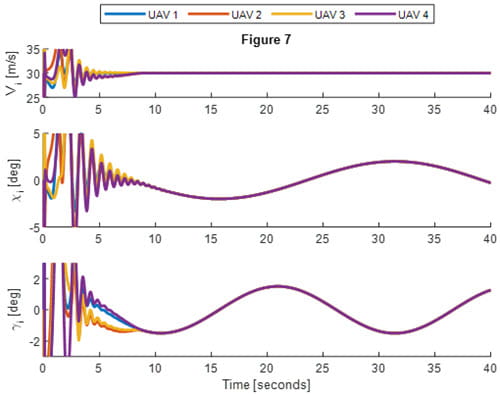
Fig. 7. Velocities, heading angles, and flight path angles of four follower
UAVs
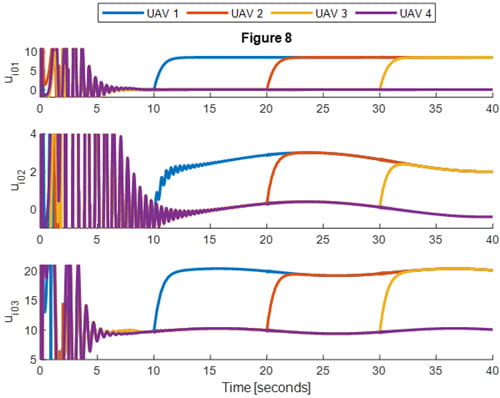
Fig. 8. Control inputs ui0 j , i = 1–4 and j = 1–3
شکل 9: این شکل قابل رسم نبود زیرا معادله F_tilde واضح داده نشده است.
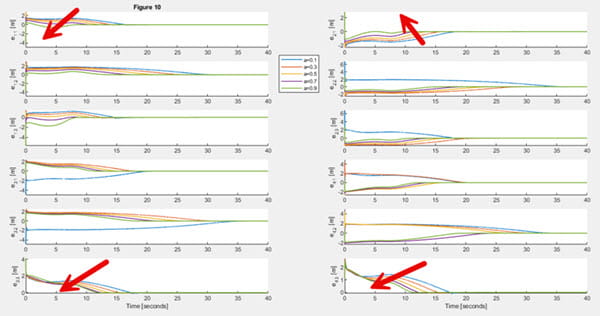
Fig. 10. Distributed tracking errors ei j under the developed FO FTFC method with different FO operators and the IO FTFC method, i = 1–4 and j = 1–3
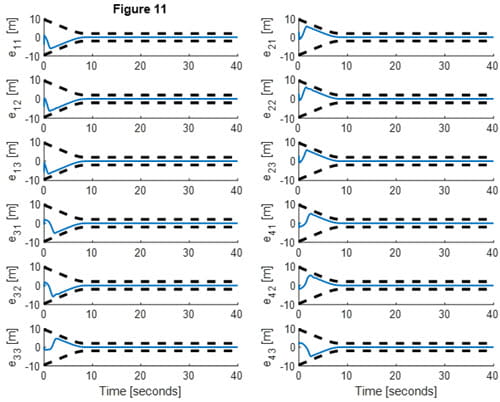
Fig. 11. Distributed tracking errors ei j under the developed method and the comparative “No_PPF” and “No_PPF_No_Learning” methods, i = 1–4 and j = 1–3
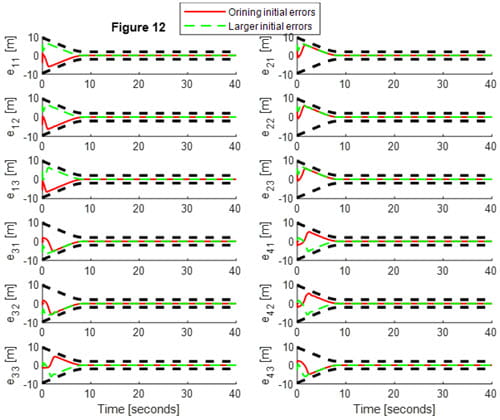
Fig. 12. Distributed tracking errors ei j of the developed FO FTFC method with original and larger initial errors, i = 1–4 and j = 1–3
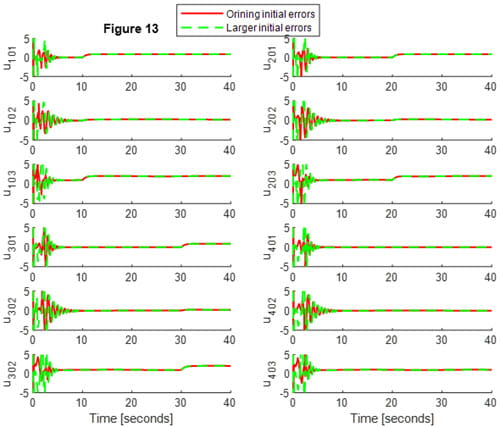
Fig. 13. Control inputs ui0 j under the developed FO FTFC method with original and larger initial errors, i = 1–4 and j = 1–3
✔ حرکت UAVها منطبق با مقاله
✔ همگرایی خطاها به صفر
✔ رفتار صحیح ورودیهای کنترلی در زمانهای بحرانی (t=10,20,30)
✔ بهبود عملکرد با افزایش پارامتر مرتبهکسری
✔ تطابق دینامیکی سرعت و زوایا با نتایج مقاله
برخی شکلهای مقایسهای مقاله به دلیل عدم ارائه کامل معادلات در مقاله اصلی قابل بازتولید نبودهاند که در گزارش بهصورت دقیق توضیح داده شده است.
مناسب چه افرادی است؟
این پروژه مناسب است برای:
- پژوهشگران حوزه UAV
- فعالان سیستمهای چندعاملی (Multi-Agent Systems)
- علاقهمندان یادگیری تقویتی در سیستمهای غیرخطی
مزیت این پروژه نسبت به نمونههای مشابه
🔹 مستندسازی دقیق معادلات داخل سیمولینک
🔹 پیادهسازی مرتبهکسری
🔹 ساختار تمیز و قابل توسعه
🔹 امکان تغییر سناریو و توسعه مقاله
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مشارکتی مقاوم به خطا پهپادهای در معرض خطاهای دائمی و متناوب
- کنترل امنیتی مبتنی بر رویداد پویا برای سامانههای کنترل شبکهای تحت حملات سایبری: رویکردی بر پایه کنترل پیشبین مدلمبنا
- کنترل بهینه مبتنی بر یادگیری تقویتی برای سیستم غیرخطی محدود از طریق یک تبدیل جدید وابسته به حالت
- کنترل مشارکتی بهینه با استفاده از یادگیری تقویتی ساده شده برای دسته ای از سیستم های چند عاملی با دینامیک ناشناخته
- کنترل بازخورد خروجی رویداد-مبتنی پویا برای سیستمهای شبکهای تحت چندین حمله سایبری
شبیهسازی کنترل تشکیل آرایش مقاوم در برابر خطا پهپادهای بالثابت شبکهای با یادگیری تقویتی و کنترل مرتبهکسری (FO-RL FTFC) در متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.