توضیحات
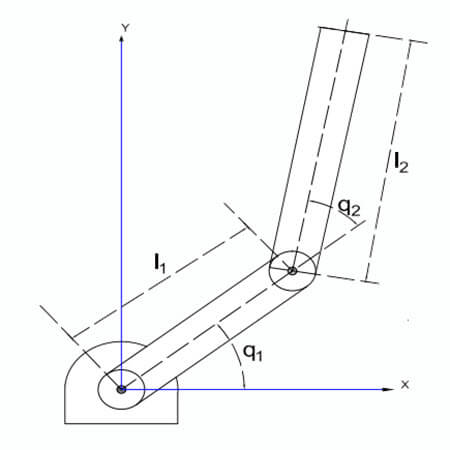
کنترل شبکه عصبی یک بازوی رباتیک با محدودیت ورودی و خروجی
عنوان اصلی مقاله
Neural Network Control of a Robotic Manipulator With Input Deadzone and Output Constraint
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای راهنمای اجرای شبیه سازی می باشد.
توضیحات پروژه کنترل شبکه عصبی یک بازوی رباتیک
دو پوشه برای این شبیه سازی در نظر گرفته شده است. یکی برای k=5 و دیگری k=50
هر پوشه مربوط به شبیه سازی با مقدار مربوط به k است. میتوانید k را در خطوط 12 تا 14 فایلهای m با نامهای «output_feedback_control» و «state_feedback_control» تغییر دهید.
هر دو شبیه سازی با فایل main.m قابل ران شدن هستند.
این پروژه شامل گزارش نیست ولی در کدهای شبیه سازی شده کامنت گذاری شده است. به طوریکه مثلا در هر بخش هر معادله ای پیاده سازی شده, شماره معادله مورد نظر در مقاله کامنت شده است.
مانند:
و در زیر این کامنت معادله 54 مقاله پیاده سازی شده است.
نتایج شبیه سازی با متلب
نتایج شبیه سازی با k=5
![Fig. 5. Tracking performance of constrained controllers at k1 = k2 = 5 andK2 = diag[5,5]](https://www.matlabi.ir/wp-content/uploads/2023/11/1.jpg)
Fig. 5. Tracking performance of constrained controllers at k1 = k2 = 5 and
K2 = diag[5,5]
![Fig. 6. Error of constrained controllers at k1 = k2 = 5 and K2 = diag[5,5]](https://www.matlabi.ir/wp-content/uploads/2023/11/22.jpg)
Fig. 6. Error of constrained controllers at k1 = k2 = 5 and K2 = diag[5,5]
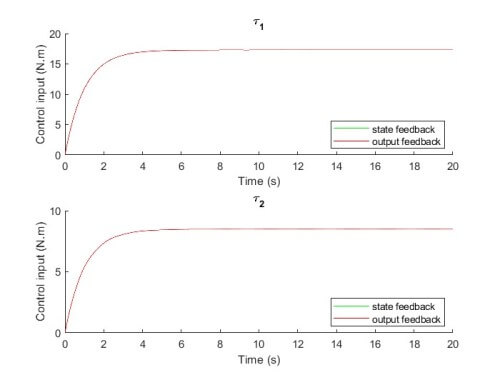
Fig. 7. Torque inputs of constrained controllers

Fig. 8. Norms of radial basis function neural network
نتایج شبیه سازی با k=50
![Fig. 9. Tracking performance of constrained controllers at k1 = k2 = 50and K2 = diag[50,50]](https://www.matlabi.ir/wp-content/uploads/2023/11/11-2.jpg)
Fig. 9. Tracking performance of constrained controllers at k1 = k2 = 50 and K2 = diag[50,50]
![Fig. 10. Error of constrained controllers at k1 = k2 = 50 andK2 = diag[50,50]](https://www.matlabi.ir/wp-content/uploads/2023/11/21.jpg)
Fig. 10. Error of constrained controllers at k1 = k2 = 50 and K2 = diag[50,50]
![Fig. 11. Tracking performance of unconstrained controllers at k1 = k2 = 5and K2 = diag[5,5]](https://www.matlabi.ir/wp-content/uploads/2023/11/31.jpg)
Fig. 11. Tracking performance of unconstrained controllers at k1 = k2 = 5 and K2 = diag[5,5]
![Fig. 12. Error unconstrained of controllers at k1 = k2 = 5 andK2 = diag[5,5]](https://www.matlabi.ir/wp-content/uploads/2023/11/41.jpg)
Fig. 12. Error unconstrained of controllers at k1 = k2 = 5 and K2 = diag[5,5]
شاید به موارد زیر نیز علاقه مند باشید:
- روش جدید برای کنترل و مسیر یابی سیستم های رباتیک چند عاملی
- کنترلرهای مود لغزان تطبیق ناپذیر بر حسب شبه سرعتهای ساکن
- کنترل و پایدارسازی بازوی مکانیکی روبات با استفاده از تئوری معادلات ریکارتی وابسته به حالت
- یک کنترلر پیش بین مدل تثبیت کننده برای تنظیم ولتاژ مبدل بوست DC/DC
- مدل کنترل پیش بین برای ربات سایز کوچک همه جهته با محدودیت موتور و عدم لغزش
کلیدواژه:
Adaptive control, barrier Lyapunov function, constraints, deadzone, neural networks, robotic manipulator
کنترل تطبیقی, عملکرد مانع لیاپانوف, محدودیت ها, منطقه مرده, شبکه های عصبی, بازوی رباتیک
کنترل شبکه عصبی یک بازوی رباتیک با محدودیت ورودی و خروجی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.